
Jiang DING, Chaocheng SONG, Cui MA, Kai HE, Qiyang ZUO. Monocular Vision Pose Solving Algorithm Based on Feature Circle Target[J]. Acta Photonica Sinica, 2023, 52(2): 0211006
- Acta Photonica Sinica
- Vol. 52, Issue 2, 0211006 (2023)
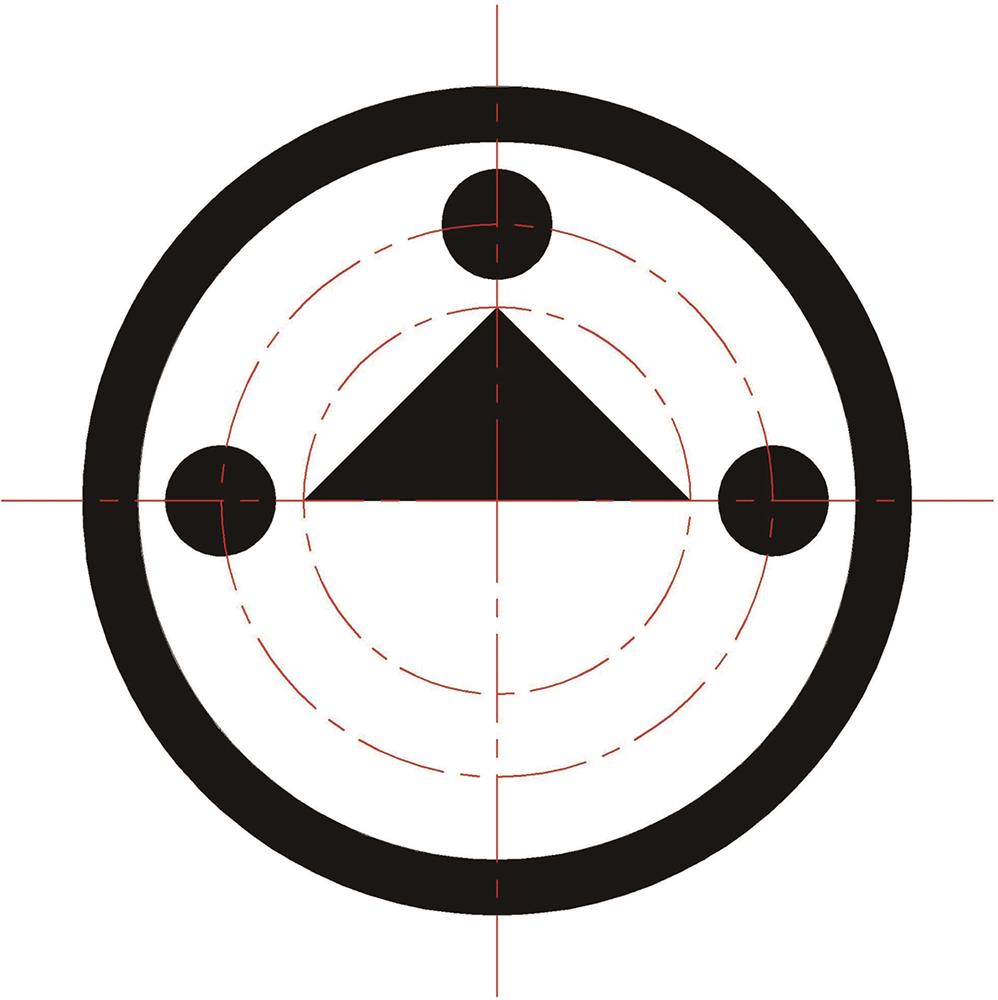
Fig. 1. Characteristic circular target
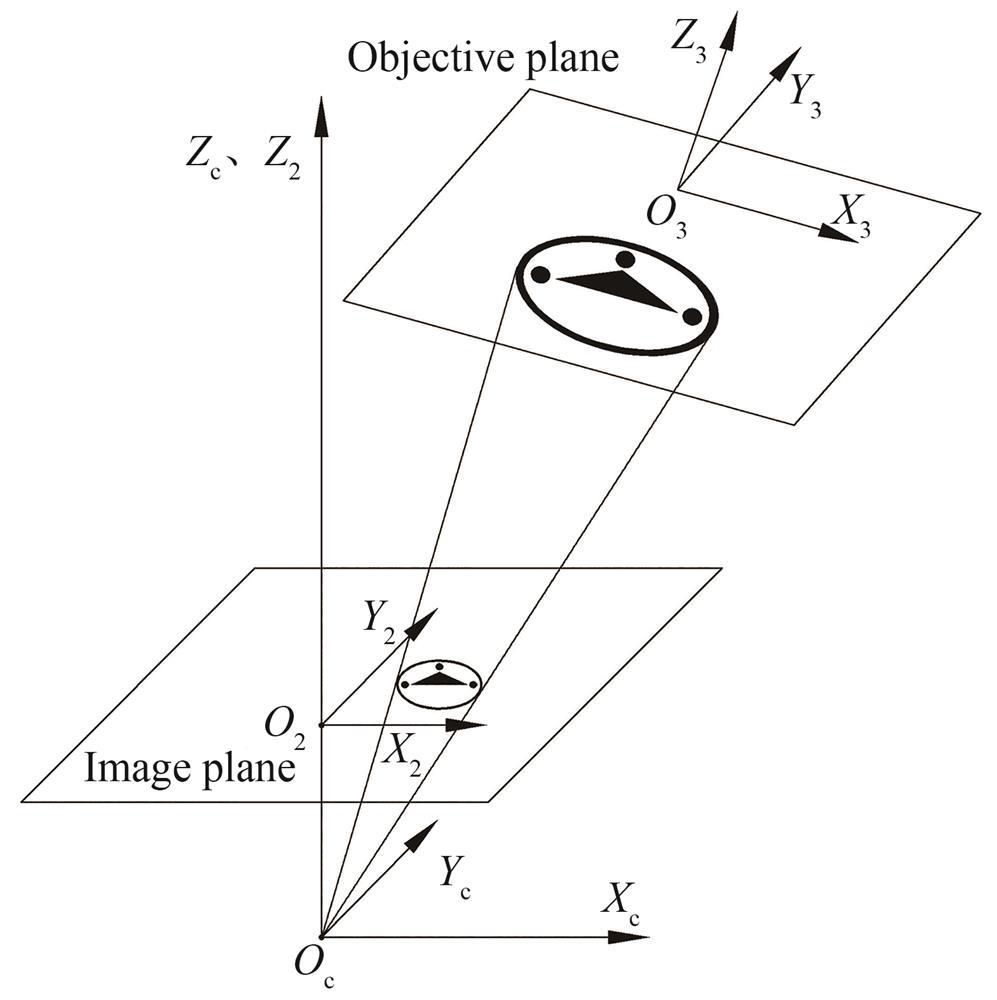
Fig. 2. Camera imaging principle
Fig. 3. perspective projection principle
Fig. 4. Schematic projection of a circular target
Fig. 5. Variation of a1 and a2 lengths under perspective distortion
Fig. 6. The variation of absolute error accuracy of ellipse method
Fig. 7. Absolute error variation of different algorithms(r=15 mm)
Fig. 8. Experimental platform of spatial plane pose measurement
Fig. 9. Imaging region of camera at different object distances
Fig. 10. Experiments of absolute error based on different algorithms(r=15 mm)
|
Table 1. Main equipment
|
Table 2. Results of three algorithms(r=15 mm)


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20