
Anhu Li, Wenjie Luo, Xingsheng Liu, Zhaojun Deng. 3D Reconstruction of Array Virtual Camera[J]. Laser & Optoelectronics Progress, 2022, 59(14): 1415013
- Laser & Optoelectronics Progress
- Vol. 59, Issue 14, 1415013 (2022)
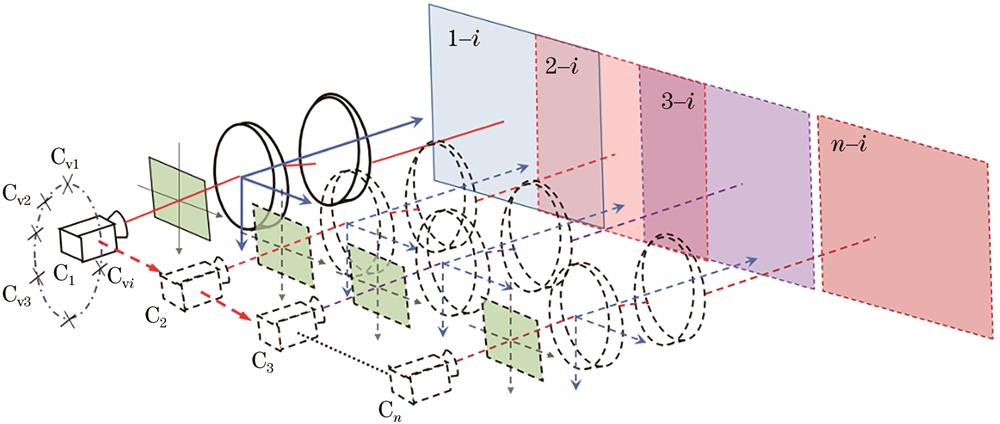
Fig. 1. Experimental system model
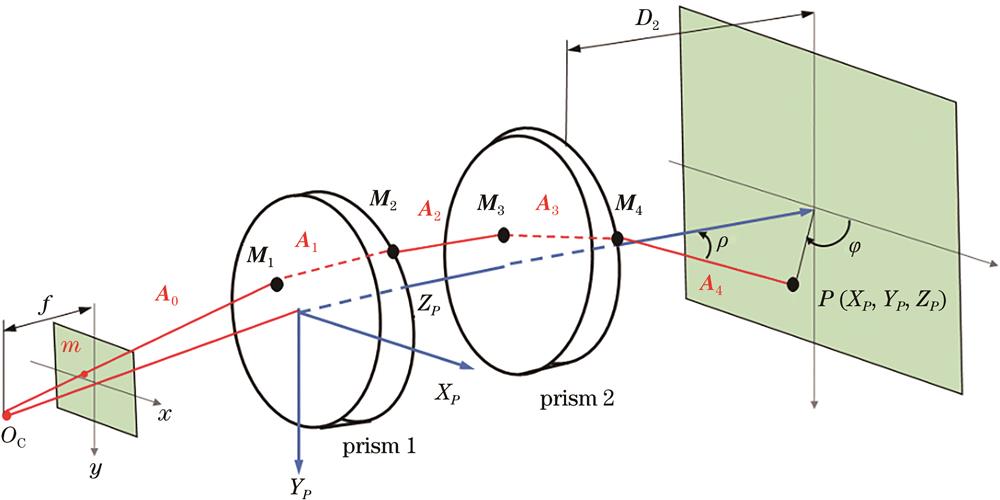
Fig. 2. Rotating Risley prism model
Fig. 3. Spatial point imaging diagram of adjacent array virtual cameras
Fig. 4. Imaging diagram of virtual camera
Fig. 5. Simulation of overlapping view of array virtual camera
Fig. 6. Position diagram of virtual camera coordinate system
Fig. 7. Captured binocular images, the first row corresponds to the angle combination (30°, 150°), (15°, 165°), and the second row corresponds to the angle combination (0°, 180°), (-15°,-165°)
Fig. 8. Original point cloud
Fig. 9. Overlapping point clouds. (a) The first pair; (b) the second pair; (c) the third pair
Fig. 10. The first pair of point cloud registration. (a) ICP results with pre-coarse registration; (b) ICP results without coarse registration
Fig. 11. The second pair of point cloud registration. (a) ICP results with pre-coarse registration; (b) ICP results without coarse registration
Fig. 12. The third pair of point cloud registration. (a) ICP results with pre-coarse registration; (b) ICP results without coarse registration
Fig. 13. The final splicing result. (a) Point cloud diagram; (b) point cloud coloring diagram
|
Table 1. Internal and external parameters of camera
|
Table 2. Comparison of point cloud registration time


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20