
Xudong Lin, Xu Zhang. Accurate Camera Calibration Method Based on Perspective Distortion Correction[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1615004
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1615004 (2023)
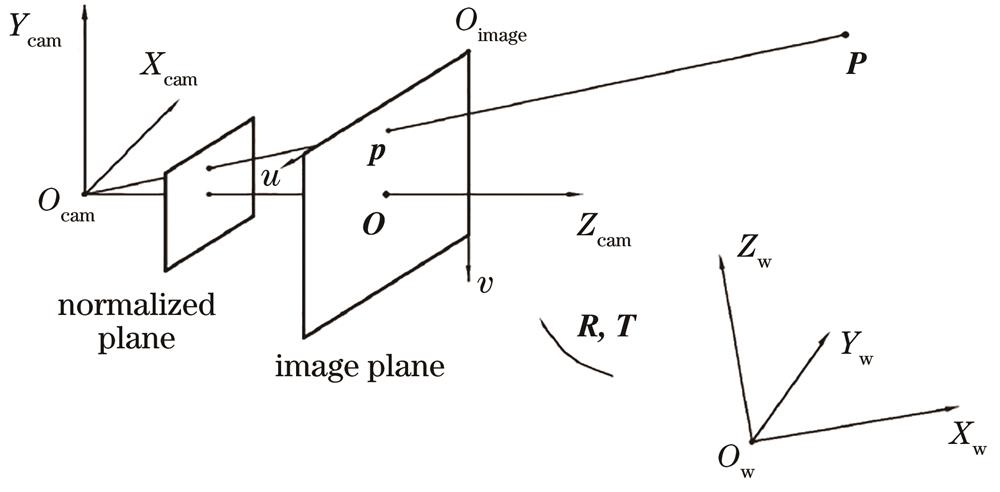
Fig. 1. Ideal camera model
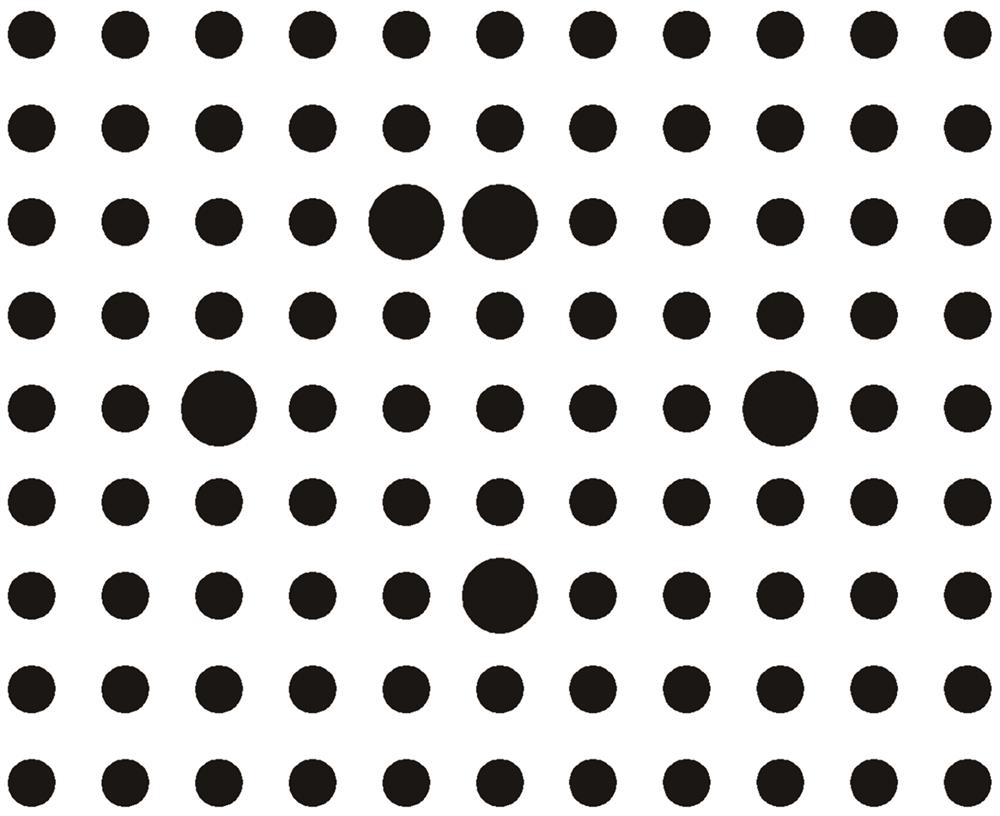
Fig. 2. Circular array target
Fig. 3. Sorting of landmarks
Fig. 4. Camera rotation
Fig. 5. Target pose
Fig. 6. Scatter plots for residual error. (a) Traditional method; (b) Heikkilä method; (c) proposed method
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Simulation results
| ||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Camera calibration results


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20