
Taifei Zhao, Haochen Du, Yuqi Chen, Borui Zheng, Shuang Zhang. Improved Particle Swarm Path Planning for Ultraviolet Cooperative Drone Penetration[J]. Laser & Optoelectronics Progress, 2025, 62(3): 0306001
- Laser & Optoelectronics Progress
- Vol. 62, Issue 3, 0306001 (2025)
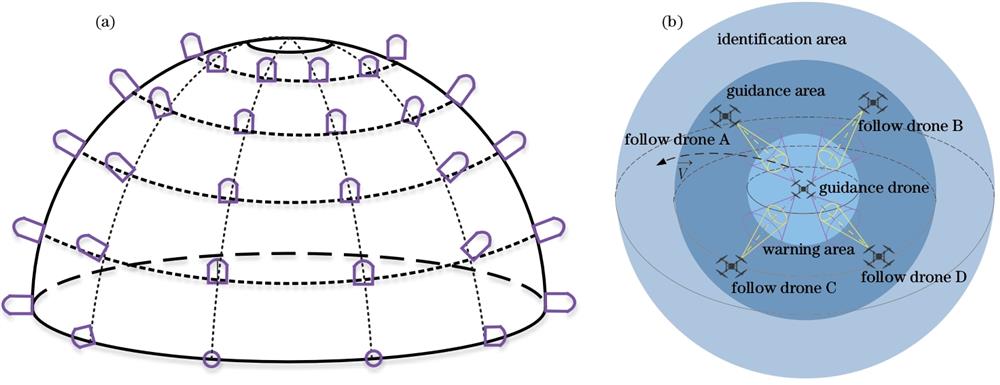
Fig. 1. Plan diagram for maintaining the leading link within the formation. (a) Airborne hemispherical MIMO model; (b) maintaining the UV light guidance link among multiple machines
Fig. 2. Chaos distribution
Fig. 3. Pseudo code of the MRPSO algorithm
Fig. 4. Terrain threat model. (a) UAV cluster terrain collision map; (b) UAV formation topology map
Fig. 5. Rendering of penetration path planning in radar-free environments. (a) Front view; (b) side view
Fig. 6. Convergence curve of fitness value in radar-free environments
Fig. 7. Distribution of simulation results in radar-free environments. (a) Fitness value; (b) penetration success rate
Fig. 8. Effect diagram of penetration path planning in complex radar environments. (a) Front view; (b) side view
Fig. 9. Fitness value convergence curve in complex radar environments
Fig. 10. Distribution of penetration success rate in complex radar environments. (a) Ultraviolet collaboration; (b) radio collaboration
Fig. 11. Distribution of fitness values in complex radar environments. (a) Ultraviolet collaboration; (b) radio collaboration
Fig. 12. Comparison of different collaboration methods across four algorithms. (a) Penetration success rate; (b) fitness value
|
Table 1. Algorithm parameters
|
Table 2. Simulation results in radar-free environments
|
Table 3. Radar detection area parameters
|
Table 4. Simulation results table in complex radar environments


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20