
Jiyun Zhang, Jianjun Wang, Xuhui Li, Jiongyu Wang, Xiaoxiao Cheng, Guangbin Wang. Optimization of Feature-Extraction Method for Stockpiled Materials Based on LiDAR[J]. Laser & Optoelectronics Progress, 2023, 60(2): 0228005
- Laser & Optoelectronics Progress
- Vol. 60, Issue 2, 0228005 (2023)

Fig. 1. Technology roadmap
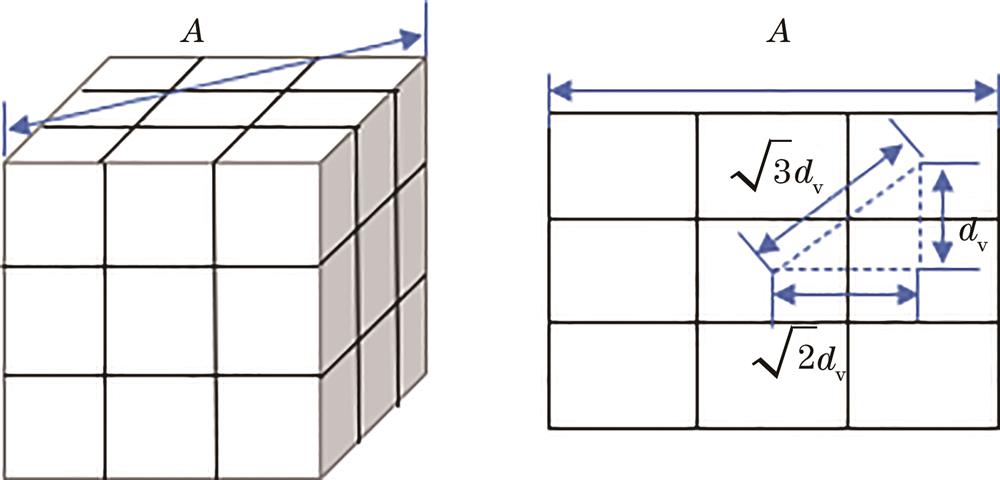
Fig. 2. 26 adjacency diagram of voxel and section
Fig. 3. Two adjacent points converge. (a) Convex relation; (b) concave relation
Fig. 4. Laser scanning point cloud simulation and its preprocessing. (a) Model cloud; (b) preprocessing
Fig. 5. Simulation results of region growing algorithm
Fig. 6. Simulation point cloud. (a) Supervoxel clustering; (b) concave and convex clustering
Fig. 7. Point cloud data collected by LiDAR
Fig. 8. Point cloud of mound pretreatment process. (a) Original cloud; (b) through filter; (c) statistical filter; (d) moving least squares(MLS)smooth
Fig. 9. Results of regional growthing experiment
Fig. 10. Results of point cloud clustering. (a) Supervoxel clustering;(b) concave and convex clustering
|
Table 1. Quantitative analysis of segmentation results in Fig. 5, Fig. 6, and Fig.10


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20