
Xiangwen CHEN, Haitao LI. Speed fluctuation suppression of the gimbal system with harmonic drive[J]. Optics and Precision Engineering, 2022, 30(20): 2457
- Optics and Precision Engineering
- Vol. 30, Issue 20, 2457 (2022)
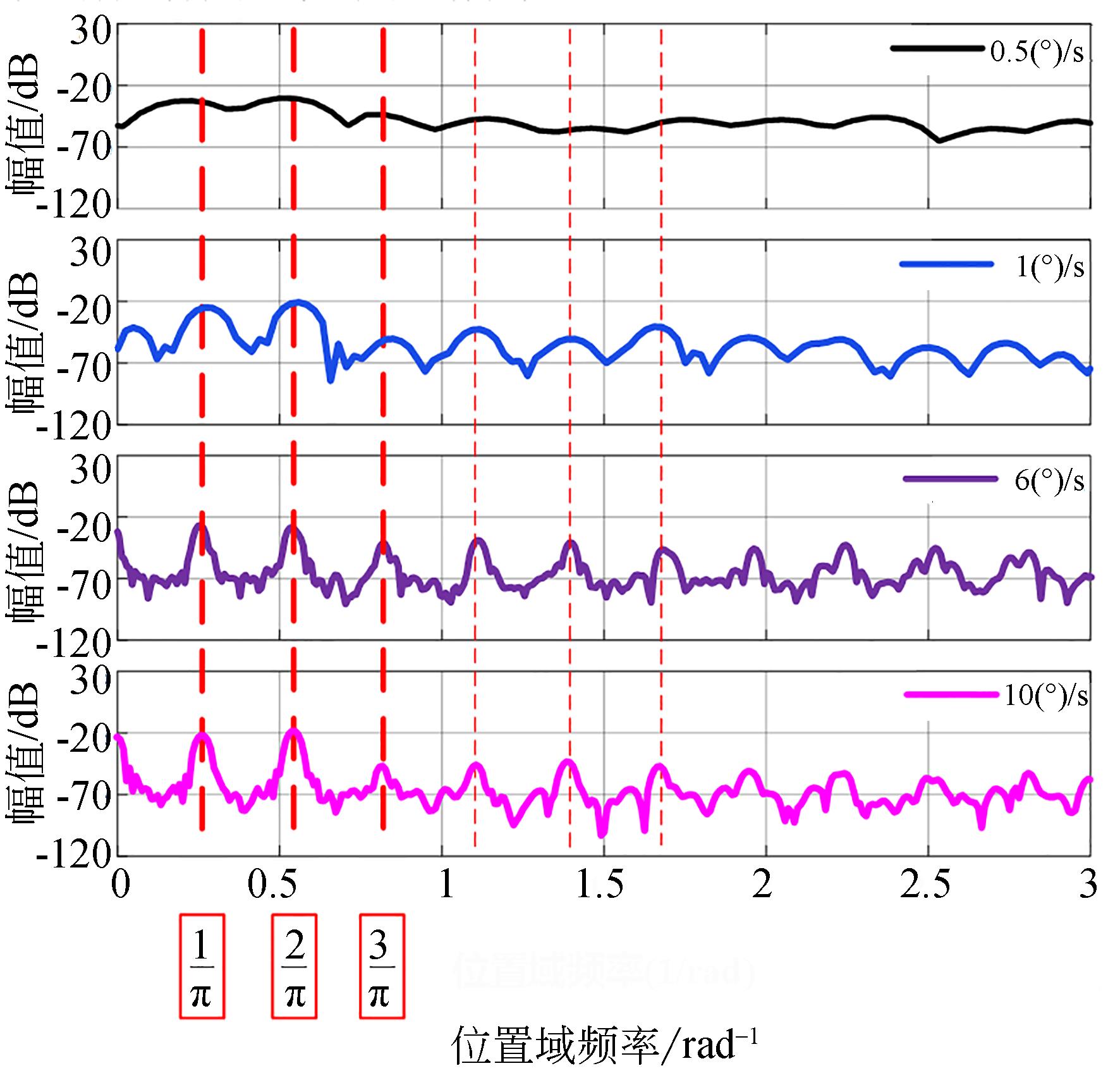
Fig. 1. Spectrum of motion error in position domain

Fig. 2. Block diagram of iterative learning control
Fig. 3. Block diagram of gimbal system based on iterative learning feedforward control
Fig. 4. Compensation signal under different iteration times
Fig. 5. Load speed fluctuation under different iteration times
Fig. 6. Compensation signal under different iteration times with noise
Fig. 7. Experimental platform based on single gimbal magnetic levitation control moment gyro
Fig. 8. Speed before and after compensation at constant speed
Fig. 9. Sinusoidal tracking speed curve and tracking error
|
Table 1. Main parameters of intermediate drive gimbal system


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20