
Guanglin An, Zonggang Li, Yajiang Du, Huifeng Kang. Multiple Workpiece Grasping Point Localization Method Based on Deep Learning[J]. Laser & Optoelectronics Progress, 2023, 60(12): 1215002
- Laser & Optoelectronics Progress
- Vol. 60, Issue 12, 1215002 (2023)

Fig. 1. Network structure of improved GB-FRN-YOLOv5
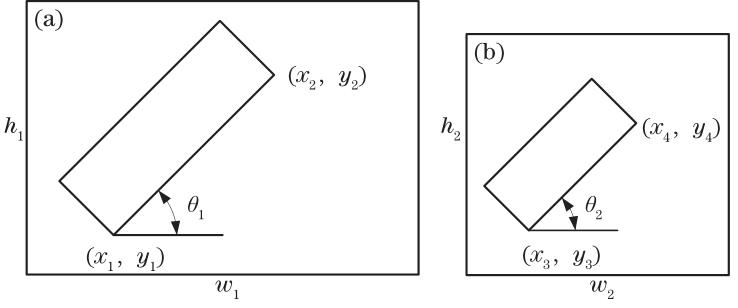
Fig. 2. Chart of target example angle change. (a) Image before scaling; (b) scaled image
Fig. 3. Schematic diagram of definition of rotating frame
Fig. 4. Schematic diagram of feature unaligned
Fig. 5. Schematic diagrams of feature refinement stage. (a) Schematic diagram of feature reconstruction; (b) bilinear interpolation
Fig. 6. Module of Ghost bottleneck
Fig. 7. Schematic diagram of ordinary convolutional layer and Ghost module calculation
Fig. 8. Feature map of attentional multiscale
Fig. 9. Training loss function of improved GB-FRN-YOLOv5 model
Fig. 10. Workpiece detection result graphs of different algorithms. (a) CAD-Net; (b) R3Det; (c) Gliding vertex; (d) GB-FRN-YOLOv5
Fig. 11. Comparison of two models. (a) Test plots of model D; (b) test plots of model E
Fig. 12. Cropping schematic of two detection methods. (a) (b) Detection map and image cropping of YOLOv5;(c) (d) detection map and image cropping of GB-FRN-YOLOv5
Fig. 13. Image processing to obtain workpiece centroid. (a) Original image; (b) grayscale; (c) median filtering; (d) binarization; (e) inversion of binarization; (f) centroid calculation
|
Table 1. Hardware configuration and model parameters
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Experimental result comparison of GB-FRN-YOLOV5 algorithm and other detection algorithms
|
Table 3. Effect of different modules on detection performance


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20