Tian Tian, Min Li, Yiwei Ma, Song Li, Tao Geng, Libo Yuan, "Highly sensitive vector bending sensor based on chirped core fiber structure," Chin. Opt. Lett. 23, 021204 (2025)
Copy Citation Text
【AIGC One Sentence Reading】:A compact MZI fiber sensor using chirped core fibers achieves high bending sensitivity and vector direction judgment.
【AIGC Short Abstract】:A compact Mach–Zehnder interferometer fiber sensor using chirped core fiber structure is proposed for vector bending measurement. With a sensing length of 8 mm, it achieves a high bending sensitivity of -230 nm/m-1 and distinguishes three bending directions by monitoring interference dip variations.
Note: This section is automatically generated by AI . The website and platform operators shall not be liable for any commercial or legal consequences arising from your use of AI generated content on this website. Please be aware of this.
Abstract
It is meaningful to develop a high-performance optic bending sensor characterized by effective direction judgment, compact length, and high sensitivity. In this Letter, a compact Mach–Zehnder interferometer (MZI) fiber sensor for vector bending measurement is proposed and investigated. This sensor is prepared by off-axis splicing seven-core fibers (SCFs) and multi-mode fibers (MMFs) with different core diameters, which achieves a compact sensing length of 8 mm. The chirped core fiber structure excites the high-order cladding mode in the interference component, which enhances the sensing sensitivity. Experimental results indicate that the maximum bending sensitivity of the sensor is -230 nm/m-1. Moreover, the three bending directions of the sensor can be distinguished by judging the variations of the two interference dips during the measuring process. The proposed method and thought can provide some operating experience and principles for the all-fiber curvature sensor design.
With the widespread use of metal materials and electrical sensors in aircraft manufacturing, the risk of lightning-induced voltage surges is increasing[1]. Fiber optic curvature sensors, with their resistance to electromagnetic interference, compact size, lightweight, and ease of integration, have widespread applications in aircraft skin technology. Fiber Bragg gratings (FBGs) and long-period fiber gratings (LPFGs) have been validated as bending sensing structures. They are typically inscribed on different cores of multi-core fibers to enable the identification of the bending direction[2]. However, it is difficult to improve the bending sensitivity of the FBGs or the LPFGs due to the low longitudinal strain coefficient of quartz and length limitation. By optimizing the coupling scheme, the sensitivity of Mach–Zehnder interferometer (MZI) sensors can be significantly enhanced, making it a current research hotspot[3]. In 2024, Martinez-Ramirez et al. inserted a segment of non-zero dispersion-shifted fiber into the single-mode fiber (SMF) and coated its surface with a polydimethylsiloxane polymer to obtain a curvature sensor. The sensor has a length of 6.5 cm and a curvature sensitivity of up to [4]. In 2021, Yan et al. presented a microfiber MZI based on a tapered seven-core fiber (SCF). The curvature sensitivity is , which is the highest value among the MZI with an SCF as best as they have known[5]. The ability of the MZI sensors to discriminate bending direction can be enhanced by disrupting the axisymmetric distribution of structure. In 2022, Hu et al. proposed a one-dimensional bending sensor by offset core splicing of a dual-core fiber and an SMF[6]. In the same year, Wei et al. removed part of the cladding on the SMF using a laser etching method. Thus, the sensor realized the recognition of one-dimensional bending direction[7]. In engineering applications, the mechanical strength, signal-to-noise ratio, and length of sensors are important parameters to consider. These factors are crucial for ensuring accurate measurements in confined and narrow spaces. Therefore, it is significant to improve vector bending sensitivity while maintaining these parameters[8].
In this Letter, a chirped-core MZI (CC-MZI) structure is designed and fabricated for vector bending measurement. The CC-MZI is formed by an off-axis splice of an SCF and a chirped core-diameter structure (CCS). The CCS consists of spliced multi-core fiber segments with different core diameters that have the same cladding diameter. The sensor’s ability to distinguish the bending direction depends on the asymmetric distribution of the light field. Simulation results show that this asymmetry increases with the increasing off-axis value. Experimental results demonstrate that the sensor has the ability to distinguish directions by judging the drift directions of two loss peaks. The CC-MZI shows a maximum bending sensitivity of and a temperature crosstalk coefficient of .
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
2. Principle and Simulation
The CC-MZI consists of spliced fiber segments with different core diameters. Its working principle is based on interference between the sensing and reference arms. A change in diameter causes a consequent change in the refractive index (RI) of the fundamental mode (), which further leads to energy coupling of and neighboring higher-order modes[9]. The higher-order modes are excited in the diameter-increasing region and coupled back to the in the diameter-reducing region. The phase difference () between two arms causes the intensity () of transmitted light to vary with the wavelength () as follows: where is the length of the structure, is the effective refractive index (ERI) difference between the arms, and and are the light intensities of the sensing and reference arms, respectively. When is established, the corresponding dip wavelength is shown as
Contrast [] of the interference fringes is determined by the ratio as follows:
The closer the light intensities of the two arms, the higher the -value and the higher the sensor resolution. The intensity of the transmitted light is determined by . Expanding the Taylor series of and retaining only the first-order term yields the following equation: where is the curvature. When the phase difference is kept constant (i.e., ), the following equations are obtained: ϒϒ
The wavelengths that satisfy the conditions and are called critical wavelengths () and crossover wavelengths (), respectively. Obviously, resonant peaks closer to or are bigger or smaller in sensitivity, respectively. Moreover, the resonance peaks located on both sides of or drift in opposite directions.
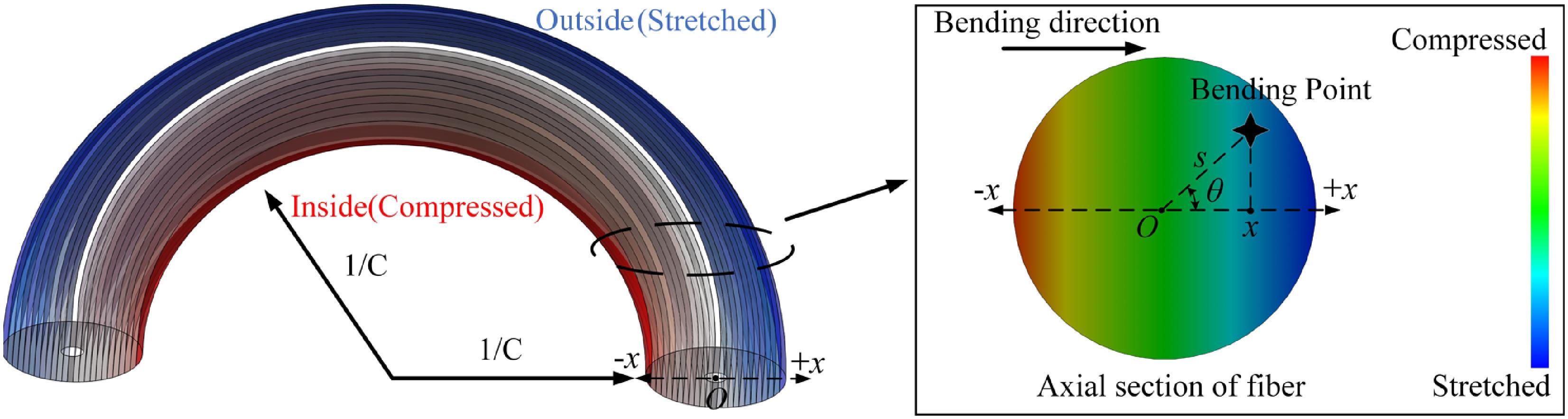
The is closely related to the degree of bending and the direction of bending, which originates from the bending deformation and the photo-elastic effect, as shown below,
Here, is the RI before bending, indicates the radial position along the bending direction which is shown in Fig. 1, and are the photo-elastic constants and Poisson’s ratio, respectively (for the silica fiber, , , and )[10].
Figure 1.Schematic diagram of fiber bending. The surface over fiber axis and perpendicular to the bending direction is the neutral surface where x = 0. (s, θ) is the polar coordinate of the bending point.
Due to the self-focusing effect, the -difference between the two arms gradually decreases along the axial direction and goes to zero at the self-imaging point, which is detrimental to sensitivity. A weakly coupled SCF is selected for the preparation of the CC-MZI. The optical path on the sensing arm is coupled into the peripheral core through cladding, eliminating self-focusing interference because the fiber cores are orthogonal to each other[11]. The SCF disrupts the circle-symmetric distribution of the light field, causing the bending sensitivity of the sensor to vary depending on orientation. This discrepancy can be further amplified by off-axis splicing. A CF-based CC-MZI is prepared, which consists of mis-core splices of CCS and SCF, as shown in Fig. 2(a). Simulations have demonstrated that the larger the mis-axial amount, the more asymmetric the light distribution of the SCF at the end face and the better the discrimination ability of the sensor in terms of direction [Fig. 2(b)]. Considering the mechanical strength of the structure, the mis-core value is set to 12.5 µm, at which point the core diameter chirp structure is tangent to SCF. Figure 2(c) compares the initial spectra of the three CC-MZI samples with identical parameters with Eq. (1), demonstrating that the two-wave interference principle applies to the structure and proving the reproducibility of the sensor fabrication. In practical curvature measurement, interference from external factors such as temperature is inevitable. Since temperature has the same effect on all arms in the CC-MZI, the variation is minimal. Consequently, the effect of material dispersion is neglected, and the temperature sensitivity is expressed as where is the thermal expansion coefficient of the fiber, and , and , are the thermo-optical coefficients and ERIs of the two arms, respectively. The above parameters are constants determined by the material itself, so the response of the peak wavelength to the temperature is linear.
Figure 2.(a) Schematic diagram of the CC-MZI based on the SCF. (b) Light distributions on the vertical axis plane of the SCF for different values of the mis-core. (c) Comparison of the transmission spectra of Eq. (1) (l = 4.2 mm) and three samples of CC-MZIs.
Preparation of the CC-MZI is performed using a fiber optic fusion splicer and a displacement cutting stage with an accuracy of 10 µm[12]. Fabrication of the CC-MZI is carried out in two steps: preparation of the CCS and off-axis splicing. The process for preparing the CCS is depicted in Fig. 3(a), which is obtained by repeating Step 1 and Step 2 alternately four times. Step 1: Fuse the fiber ends numbered and to obtain the -fusion point. Step 2: Cut the fiber at 0.4 mm from the -fusion point, where is the number of repetitions, and the fiber parameters for each number are shown in Table 1. Figure 3(b) shows the side image of the CCB, which is observed by a microscope. As shown in Fig. 3(c), two ends of the SCF are off-axis spliced with the CCB to achieve the CC-MZI structure.
Fiber type
Fiber number
Core/Cladding (μm)
SMF
1
10/125
Few-mode fiber
2
22/125
MMF-1
3
50/125
MMF-2
4
105/125
No core fiber (NCF)
5
0/125
Table 1. Parameters of Fibers Used for Preparing CCS
Figure 3.(a) Fabrication steps of the CCS. (b) Real image of the CCS through a microscope. (c) Micrograph of the off-axis splicing between the SCF and the CCS.
Here, the method to control the splicing angle between the SCF and the CCS is introduced in detail. The key to this method is the pre-calibration of the SCF core distribution. Inspired by the direction selectivity of simple cells in the primary visual cortex[13], this study uses the cross-calibration method to identify the core distribution. Initially, the SCF is fixed by rotating disks, and the positions of the cores are located using a CCD camera to observe the end face of the SCF. Here, we introduce a fiber segment which crosses the SCF as the referential fiber to mark the core’s distribution. Rotate the SCF by the disks until the outermost core is close to the fiber segment. Then the relative position between the SCF and the fiber segment is marked by the glue. The position of the fiber segment accurately reflects the distribution of the fiber cores within the SCF. The splicing error of the off-axis angle is minimized by increasing the length of the fiber segment. Thus, precise angle splicing can be achieved without visual aid devices. Place the SCF into the fusion splicer and axially rotate it until the fiber segment is parallel to the experimental platform. By adjusting the positions of two end fibers in the -axis and -axis projection planes, a 30° misalignment splice is achieved, as shown in Fig. 4. As shown in Fig. 2(c), the three samples have similar spectral shapes, and the maximum wavelength errors of peaks A and B are 13 and 49 nm, respectively.
Figure 4.Schematic diagram of off-axis splicing using a fiber fusion splicer. (a) Fiber position distribution in the x–y plane. (b) Fiber position distribution in the x–z plane. (c) Structure observed from the y–z plane.
The platform for temperature and bending measurement is depicted in Fig. 5(a), a broadband light source and a spectrometer are used for monitoring the spectrum of the sensor during the measurement. A flexible thin steel ruler with a length () of 140 mm is used to apply the curvature to the structure, where the curvature is related to depth of the micrometer screw as follows ():
Figure 5.(a) Schematic diagram of the bending and temperature measurement platform. (b) Definition of bending direction.
Additionally, curvature measurement with different directions is realized by rotating clamps, and the defined bending direction is shown in Fig. 5(b). In the experiment, the variation of spectra with bending degree is monitored at curvature intervals of for different bending directions (angular intervals of 15°). It is noteworthy that they have different combinations of drift directions at different angles, as shown in Fig. 6(a). As shown in Fig. 6(b), both the critical wavelength and crossover wavelength exist in the measured spectral range[14]. The is located between the bimodal peaks, and is close to Dip A and is strongly influenced by the bending direction (curvature of ). At directions of 0° or 180°, the is located on the left side of Dip A, and double peaks drift inversely [Figs. 6(c) and 6(e)]. At the direction of 90°, the is situated on the right side of Dip A and the double peaks drift identically [Fig. 6(d)].
Figure 6.(a) Variation of the broad spectrum with curvatures in the 0°, 90°, and 180° directions. (b) Spectral potential corresponding to the interference peak in the bending direction. The variation of transmission spectra with different curvatures at (c) 0°, (d) 90°, and (e) 180°.
The fitting curves of Dip A and Dip B during the curvature measurement are shown in Figs. 7(a) and 7(b), respectively. Since the light field of the sensing arm is concentrated in the vicinity of fiber cores 4 and 5, the condition is satisfied. Combining Eq. (2) and Eq. (6) shows that in terms of sensitivity direction, 180° is opposite to 0° and 90°. In terms of sensitivity magnitude, 90° is smaller than 0° and 180°.
Figure 7.Fitting curves between the wavelength and the curvature at bending directions of 0°, 90°, and 180°. (a) Dip A. (b) Dip B. (c) Dip B–Dip A. (d) Fitted curve of the bending direction and curvature sensitivity of FSRA-B. (e) Error analysis.
Additionally, the relationship between the curvature and relative wavelength difference () is presented in the Fig. 7(c). The fitting curve of the wavelength difference exhibits better linearity compared to single wavelength demodulation. It can be attributed to the constantization of the ϒ in Eq. (5) by doing the subtraction operation. As shown in Figs. 7(a), and 7(b), for 0° and 180°, the sensitivities of Dip A and Dip B have opposite directions and exhibit complementary characteristics. (When the double peaks are located on one side of and on both sides of , as the critical wavelength shifts, the sensitivity of one peak increases while the other peak decreases). For 90°, the sensitivity of the double peaks is in the same direction and increases or decreases together.
Figure 7(d) shows that the bending sensitivity of exhibits a cosine function with the bending direction, proving that the ϒ in Eq. (5) approximates to a constant by doing the subtraction operation [connecting Eq. (2) and Eq. (7), can be considered as a cosine function of ]. Additionally, to verify the stability and repeatability of the proposed sensor, multiple curvature measurements are applied to the CC-MZI, as shown in Fig. 7(e). Within the same measurement range, the curvature sensitivities of at 0°, 90°, and 180° directions are , , and , respectively. The maximum offset error for all collected points is 5.84 nm (180°), with a calculated maximum measurement error of .
Figure 8(a) shows the linear fitting curves between the wavelength and temperature of the CC-MZI. The temperature sensitivities of Dip A and Dip B are 33.87 and 44.63 pm/°C, respectively. Correspondingly, the temperature sensitivity of the is 10.76 pm/°C. Additionally, the temperature crosstalk coefficients are , , and at 0°, 90°, and 180°, respectively. Due to the non-axisymmetric nature of the structural shape, the strain-induced refractive index variable (by photo-elastic effect) is analogous to bending in the 0° direction, which is directional in the cross section. The strain response of the structure is similar to the bending response at 0°, as shown in Fig. 8(b). The sensitivities of Dip A and Dip B are and 49 pm/msub, respectively. Thus, the strain sensitivity of can be calculated as 49.87 pm/msub. Consequently, the corresponding strain crosstalk in different bending directions are , , and με, respectively. Experimental results indicate that the proposed CC-MZI achieves an excellent sensing performance. In contrast to the general SCF calibration method[9], the cross-calibration method allows more precise splicing angles, thereby enabling the precise selection of super-modes. In addition, the high linearity and small size of the sensor are important factors in practical applications. Table 2 illustrates the performance differences between the CC-MZI and other interference structures, which shows that the proposed curvature sensor has the advantages of high sensitivity, low crosstalk, and compact length. More importantly, the CC-MZI has the ability to distinguish three different directions. It provides the possibility for the design of fiber-bending sensor.
Type
MBS (nm/m−1)
TCC (m−1/°C)
NDD
L (cm)
S-TMF-S (MZI)[6]
16.5
4.46 × 10−3
2
2
S-M-SCF-M-S (MZI)[8]
25.96
1.81 × 10−3
1
1.13
HCF-S (FP and AR)[15]
0.2345
7.33 × 10-2
1
0.12
S-HCBG-S (ARROW)[16]
0.0744
2.26 × 10-1
1
0.6
S-bitaper-M-ball (MI)[17]
−0.68
1.13 × 10−2
1
2.4
PMF-LPFGs[18]
9.26
1.59 × 10−2
2
2.7
V-groove fiber (SPR)[19]
−5.98
Not given
2
3.7
CC-MZI
−230
1.13 × 10−4
3
0.45
Table 2. Comparing the Performance of Different Types of Fiber Optic Curvature Sensors
Although the presence of enhances the ability of the sensor to discriminate the bending direction, it also causes a number of issues. On the one hand, the curvature range of the sensor is limited to ensure a one-to-one correspondence between the angle and direction of the bimodal drift. On the other hand, the presence of reduces the sensitivity of the sensor.
5. Conclusion
In brief, a highly sensitive curvature sensor based on off-axis splicing of the SCF and fibers of different core diameters is experimentally proposed and investigated. The chirp variation of the core diameter in the axial direction improves the sensitivity of the sensor to vector bending. Experimental results indicate that the bending sensitivities are , , and at 0°, 90°, and 180°, respectively. Meanwhile, the temperature cross-talk coefficient remains below . Owing to its exceptional bending sensing capabilities, resistance to temperature interference, and minimal dimensions, the CC-MZI holds promise for integration into aircraft skin technology or forming high-resolution and high-precision subcutaneous neural networks. However, in some extreme applications, vector direction discrimination bending sensors cannot perfectly fulfill the requirements. By combining the multi-core characteristics of the seven-core optical fibers, it is expected to develop a high-sensitivity bending optical fiber sensor capable of three-dimensional direction discrimination based on a CC-MZI.
[10] A. Taghipour, F. Janabi-Sharifi, A. Rostami et al. Highly sensitive LPFG-based bending sensor in W-Type optical fiber. International Symposium on Optomechatronic Technologies(2014).
Tian Tian, Min Li, Yiwei Ma, Song Li, Tao Geng, Libo Yuan, "Highly sensitive vector bending sensor based on chirped core fiber structure," Chin. Opt. Lett. 23, 021204 (2025)
 AI Video Guide
AI Video Guide  AI Picture Guide
AI Picture Guide AI One Sentence
AI One Sentence