
Zihan Zhu, Guangyuan Zhang, Hualei Jin, Peng Wang. Optimization of Needle Plane Measurement for Dorsal Hand Injection Based on Linear Structured Light Scanning[J]. Laser & Optoelectronics Progress, 2022, 59(24): 2411003
- Laser & Optoelectronics Progress
- Vol. 59, Issue 24, 2411003 (2022)
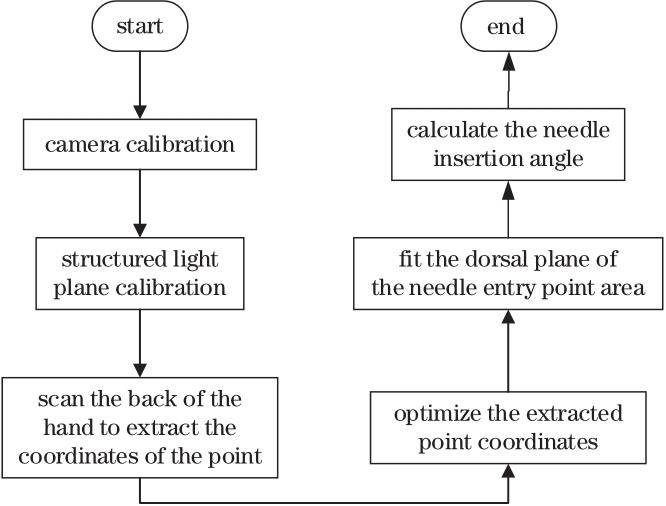
Fig. 1. Work flow chart
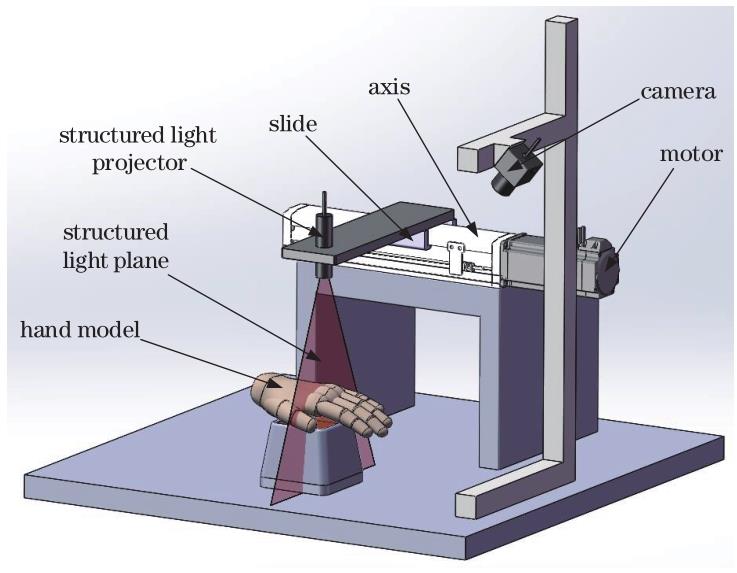
Fig. 2. Experimental platform model
Fig. 3. Flow chart of single structured light plane calibration
Fig. 4. Calibration of structured light plane
Fig. 5. Linear constraint graph
Fig. 6. Plane constraint graph
Fig. 7. Flow chart of multi-structured light plane calibration
Fig. 8. Experimental platform entity model
Fig. 9. Checkerboard calibration pattern
Fig. 10. Camera coordinate points collected from a group of images
Fig. 11. Optimization result of single structured light plane
Fig. 12. Multi-structured light plane optimization results
Fig. 13. Image refinement result and structured light strip extraction result
Fig. 14. Fitting results of the plane of the needle insertion area on the back of the hand
|
Table 1. Reprojection error optimization result
|
Table 2. Multi-structured light plane fitting results
|
Table 3. Structured light plane calibration results
|
Table 4. Structured light plane calibration optimization results


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20