
Shuhua Zhou, Sixiang Xu, Chenchen Dong, Hao Zhang. Algorithm for Binocular Vision Measurements Based on Local Information Entropy and Gradient Drift[J]. Laser & Optoelectronics Progress, 2023, 60(12): 1215004
- Laser & Optoelectronics Progress
- Vol. 60, Issue 12, 1215004 (2023)
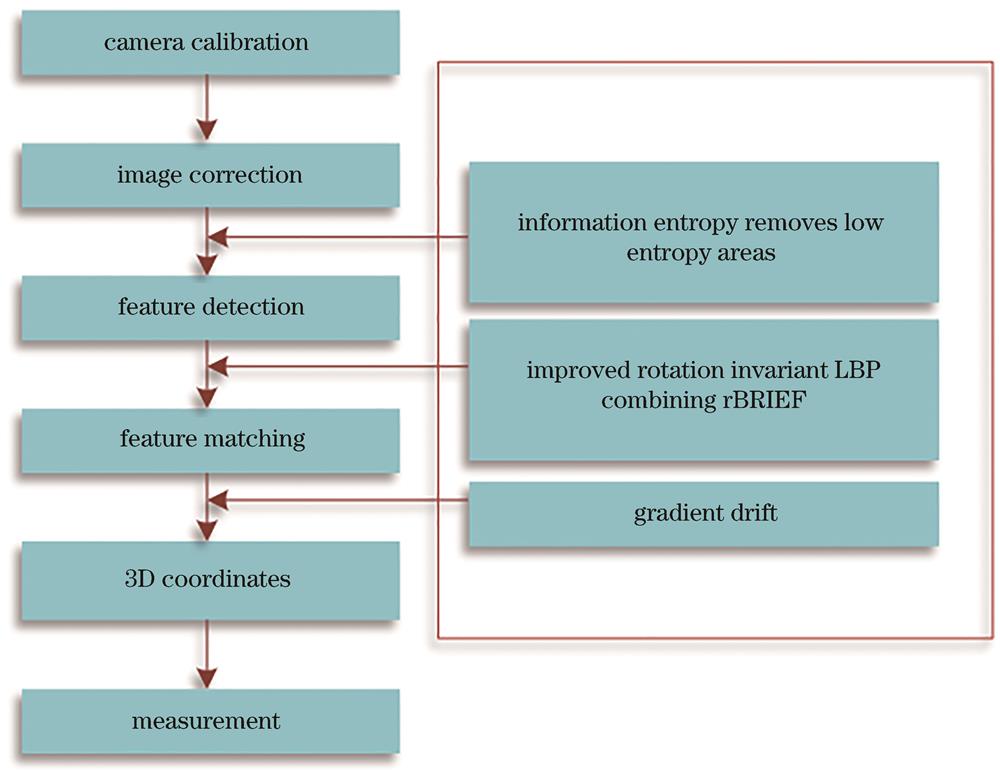
Fig. 1. Flow chart of continuous casting slab ranging
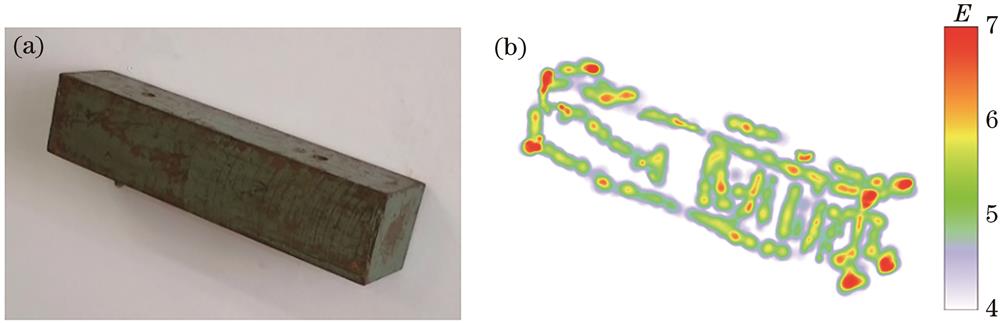
Fig. 2. Comparison diagrams of entropy value of continuous casting slab model. (a) Continuous casting slab model diagram;(b) continuous casting slab model entropy diagram
Fig. 3. Schematic diagram of improved rotation invariant LBP
Fig. 4. Flow chart of gradient drift
Fig. 5. Schematic diagrams of gradient drift. (a) Schematic diagram of single drift; (b) schematic diagram of
Fig. 6. Before stereo correction (the top) and after stereo correction (the bottom)
Fig. 7. Detection results for different information entropy thresholds
Fig. 8. Comparison results of feature detection. (a) Detection results of traditional SIFT algorithm; (b) detection results of traditional SURF algorithm; (c) detection results of traditional ORB algorithm; (d) detection results of proposed algorithm
Fig. 9. Matching effect diagrams. (a) Traditional ORB algorithm rotated 0°; (b) proposed algorithm rotated 0°; (c) traditional ORB algorithm rotated 45°; (d) proposed algorithm rotated 45°; (e) traditional ORB algorithm rotated 180°; (f) proposed algorithm rotated 180°
Fig. 10. Comparison results of matching accuracy and matching time. (a) Comparison results of matching accuracy; (b) comparison results of matching time
Fig. 11. Matching points filtering
|
Table 1. Internal parameters in binocular camera
|
Table 2. External parameters in binocular camera
|
Table 3. Comparison results of feature detection data
|
Table 4. Pixel coordinate update results from gradient drift (1)
|
Table 5. Three-dimensional coordinate update results from gradient drift
|
Table 6. Measurement results of continuous casting slab model
|
Table 7. Measurement results of traditional SIFT algorithm
|
Table 8. Measurement results of traditional ORB algorithm
|
Table 9. Measurement results of proposed algorithm


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20