
Dazhi WANG, Mingluo YANG, Fengshu WANG, Zefei LI, Yu DUAN, Shiwen LIANG, Lingjie KONG, Yiru CAI, Xinlong YANG, Zetian ZHANG, Bin TANG. Design and simulation of stator for multi legged miniature linear ultrasonic motor[J]. Optics and Precision Engineering, 2024, 32(11): 1713
- Optics and Precision Engineering
- Vol. 32, Issue 11, 1713 (2024)
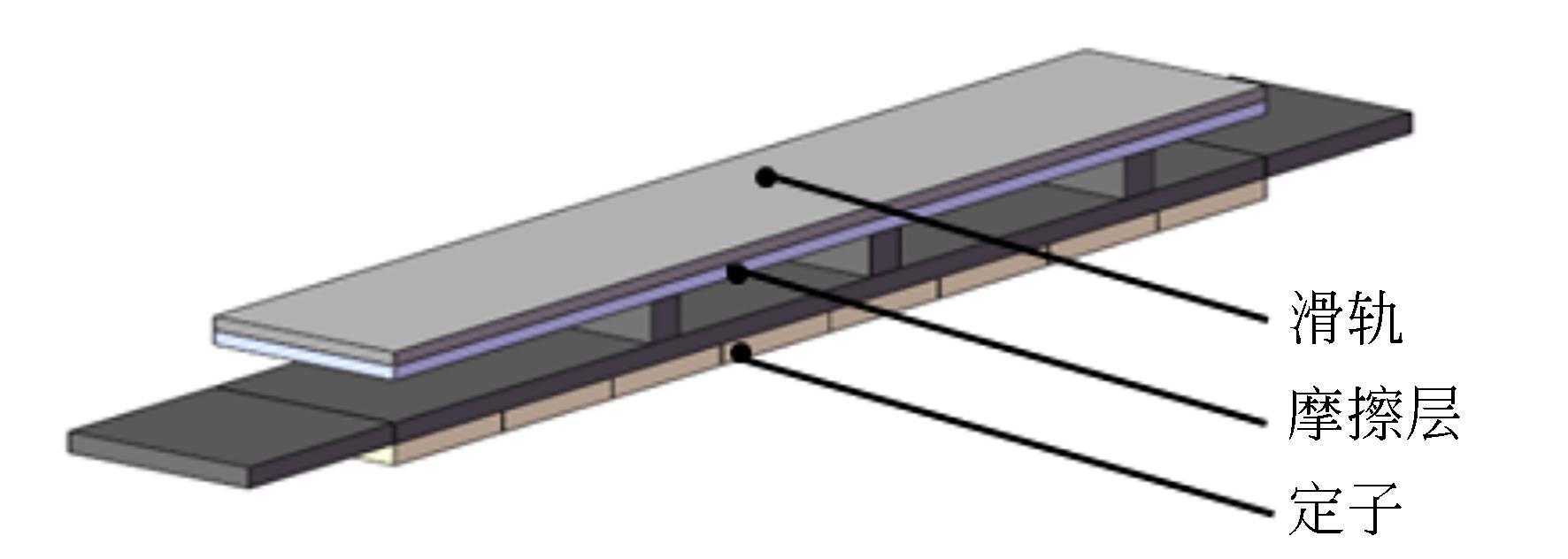
Fig. 1. Motor structure

Fig. 2. Stator drive morphology under different modes
Fig. 3. Driving foot movement analysis
Fig. 4. Distribution of drive feet in B3 and B4 modes
Fig. 5. Stator structure
Fig. 6. Mode shapes and characteristic frequencies of stator B1 to B6
Fig. 7. Stator structure and dimension annotation
Fig. 8. Variation of characteristic frequency with optimization parameters
Fig. 9. Dynamic response curves of particle amplitude on stator driven foot surface
Fig. 10. Y and Z direction amplitude response of drive foot particle
Fig. 11. Motion trajectory of drive foot particle
Fig. 12. Contact simulation model
Fig. 13. Contact simulation results under two driving modes
Fig. 14. Physical map of stator
Fig. 15. Impedance characteristic curves of stator
Fig. 16. Testing device of drive performance
Fig. 17. Preload and no-load velocity curves
Fig. 18. Load-output speed curves
|
Table 1. Simulation parameters of PZT material
|
Table 2. Final dimension parameters of stator


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20