
Yitong Pan, Zhenqi Niu, Songlin Wan, Xiaolin Li, Zhen Cao, Yuying Lu, Jianda Shao, Chaoyang Wei, "Spatial–spectral sparse deep learning combined with a freeform lens enables extreme depth-of-field hyperspectral imaging," Photonics Res. 13, 827 (2025)
- Photonics Research
- Vol. 13, Issue 4, 827 (2025)
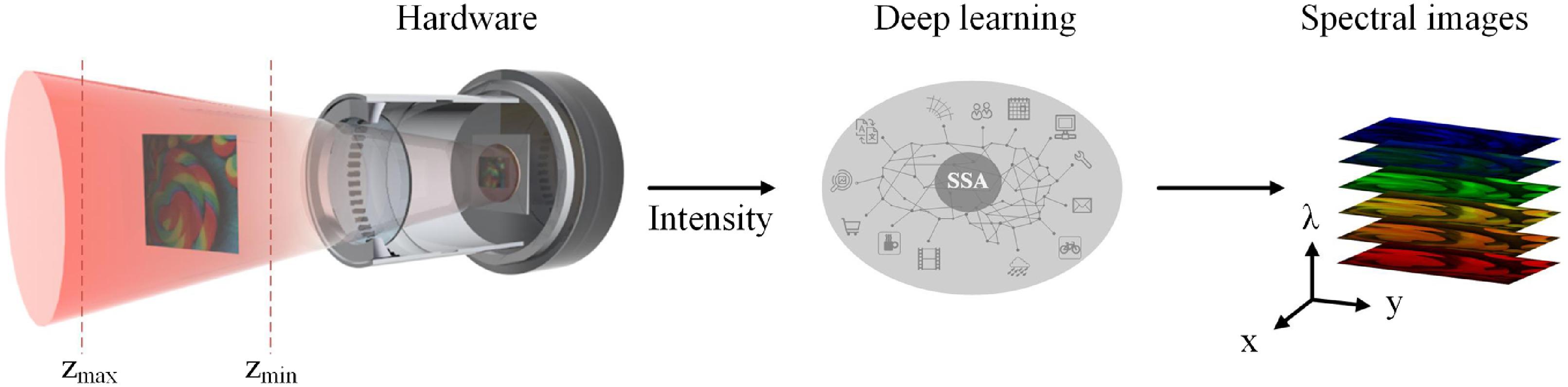
Fig. 1. Proposed E-DoF HI system. The AED hyperspectral images can be regained from the blurred image captured by the camera through subsequent processing by a deep learning neural network with SSA.
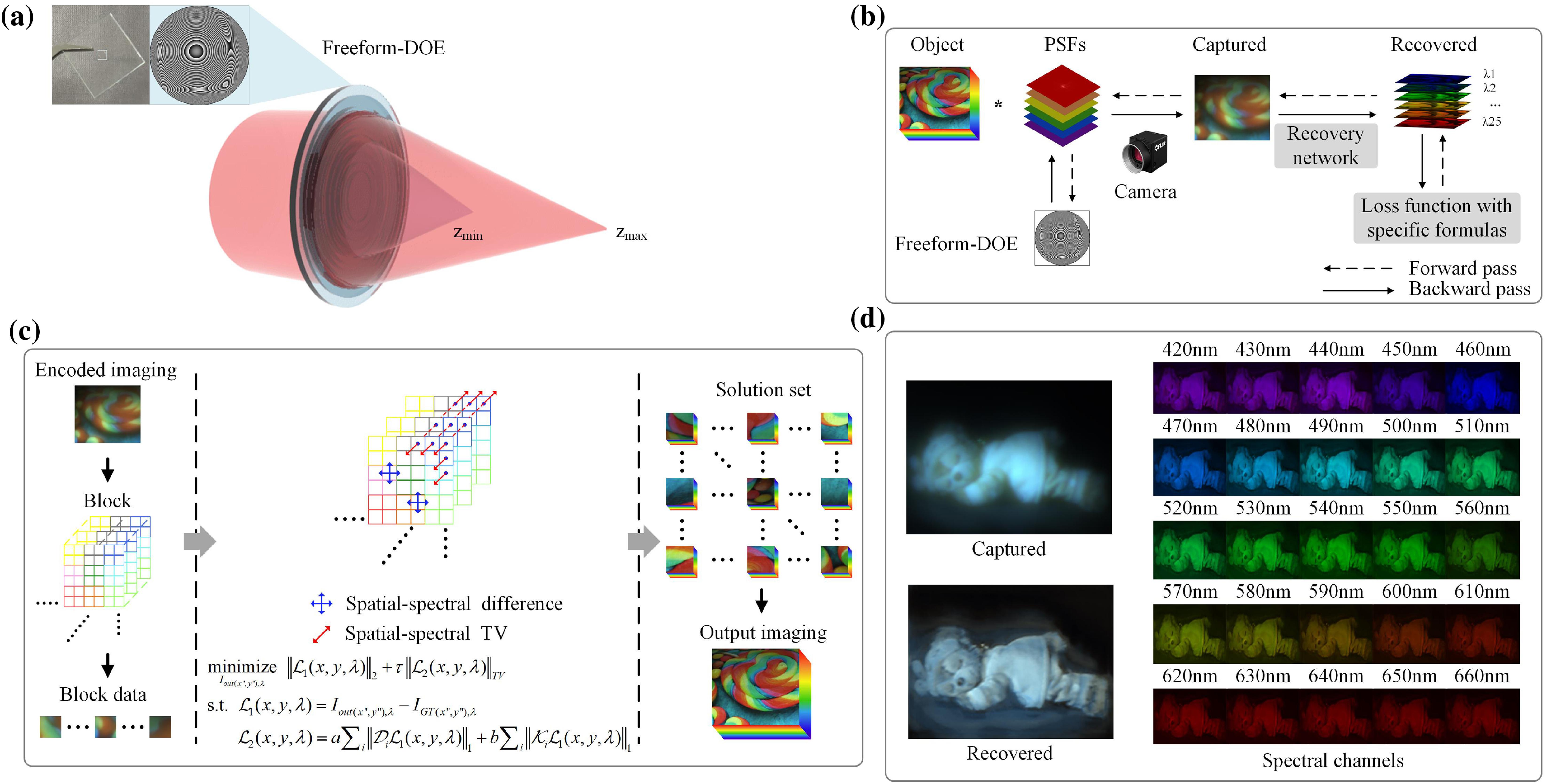
Fig. 2. Overview of AED HI system. (a) Schematic of the proposed system. System allows for high-fidelity imaging across a broad distance from Z min Z max
Fig. 3. PSF characteristics of proposed system. (a) PSFs of the system at different object distances. (b) Zoomed-in PSFs at different spectral channels.
Fig. 4. Comparison of simulation results of the three different HI systems considered in the study for the same object at different objective distances d Dataset 1 , Ref. [67]).
Fig. 5. Experimental results for extended DoF. (a) The experimental scenario diagram. (b) Objects at 1.2–5.2 m from the camera are all in focus; (c) experimental results for extended DoF at a close distance. Objects at 0.5–0.7 m from the camera are also in focus (Dataset 1 , Ref. [67]).
Fig. 6. (a) Visual comparison between proposed system and ground truth (GT). Recovered hyperspectral image and GT are both illustrated by RGB false color. (b) Intensity and accuracy of chosen dots at different wavelengths.
Fig. 7. Experimental results of reconstruction of moving objects. The blocks are pushed down from a height by a pen and their falling process is captured by a camera used in our system. The results of selected moments are shown with the RGB false color and the full results can be found in Visualization 1 .
|
Table 1. Average of SpA of Chosen Dots at Different Wavelengths
|
Table 2. Quantitative Comparison of the State-of-the-Art Methods for E-DoF in Spectral Domain


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20