




Yunqiang Hu, Yunfeng Cao, Likui Zhuang, Xiaofeng Song. Autonomous Landing Algorithm of Fixed-Wing Unmanned Aerial Vehicle Based on Visual Guidance[J]. Laser & Optoelectronics Progress, 2022, 59(14): 1415023
- Laser & Optoelectronics Progress
- Vol. 59, Issue 14, 1415023 (2022)
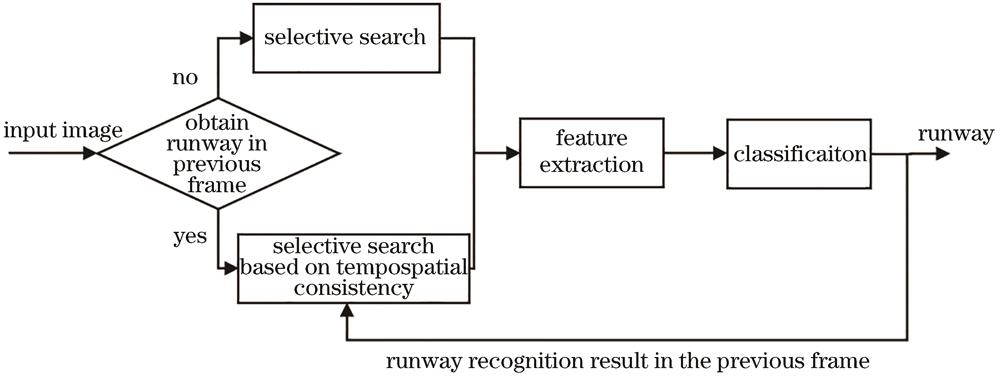
Fig. 1. Runway detection and recognition in sequence images
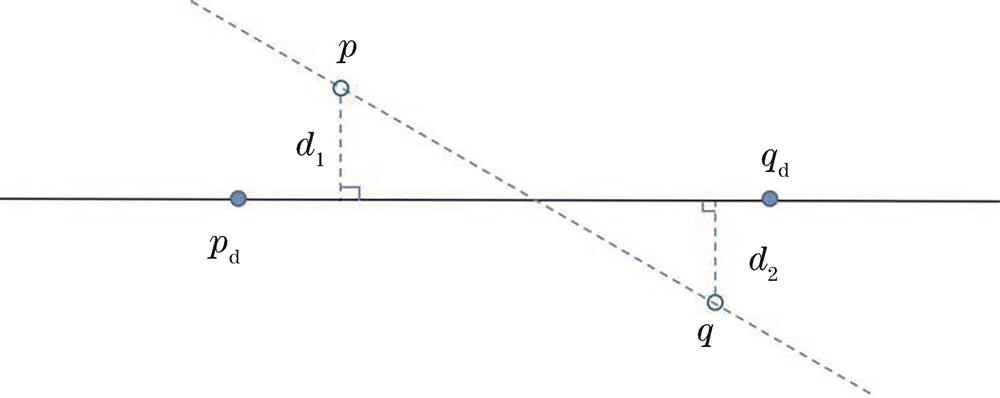
Fig. 2. Error between points and lines
Fig. 3. Experimental dataset
Fig. 4. Comparison of candidate region extraction methods
Fig. 5. Influence of detected line length integrity
Fig. 6. Tested points and lines
Fig. 7. Influence of each feature point and line on pose estimation
Fig. 8. Comparison of influence of noise on pose estimation algorithms
Fig. 9. Change of pose parameter error relative to distance between UAV and runway
|
Table 1. Effect of color space and similarity on ROI extraction
|
Table 2. Results of each dataset
|
Table 3. Comparison with other algorithms


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20