
Boxiao Zhang, Jiahui Yu, Xiaoxue Jiao, Lei Zhang. Line Structured Light Binocular Fusion Filling and Reconstruction Technology[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1611001
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1611001 (2023)
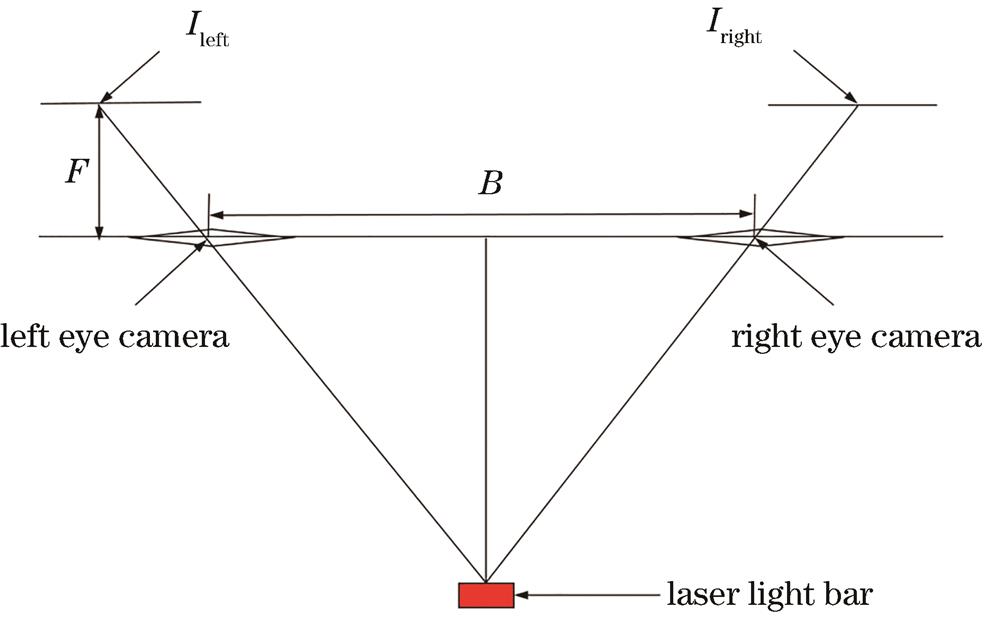
Fig. 1. Principle of original binocular line structured light 3D imaging
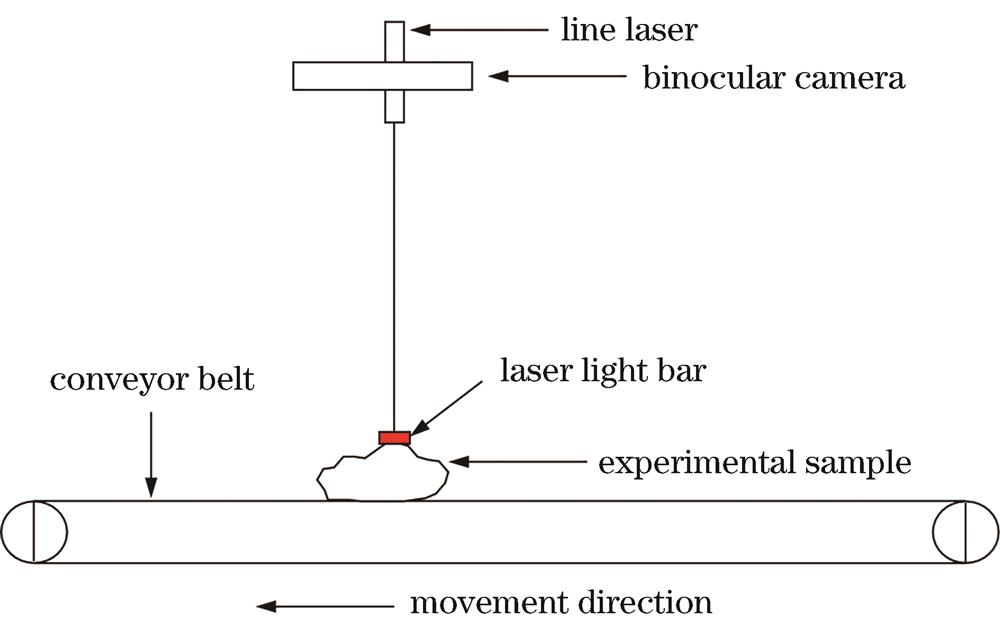
Fig. 2. Structure diagram of experimental sample collection
Fig. 3. Principle of line structured light imaging
Fig. 4. Quantitative analysis of missing information
Fig. 5. Schematic of right occlusion
Fig. 6. 3D reconstruction of binocular line structured light
Fig. 7. Experiment collection system
Fig. 8. Physical maps of the experimental sample. (a) Charger; (b) box; (c) development board
Fig. 9. Binocular image of experimental sample
Fig. 10. 3D topography acquisition results. (a) Original binocular; (b) original left eye; (c) original right eye; (d) optimized binocular
Fig. 11. Comparison of 3D topography point cloud data collection areas of each system
Fig. 12. 3D topography acquisition results of a box. (a) Original binocular; (b) original left eye; (c) original right eye; (d) optimized binocular
Fig. 13. 3D topography acquisition results of a development board. (a) Original binocular; (b) original left eye; (c) original right eye; (d) optimized binocular
Fig. 14. Comparison of 3D topography data collection areas
|
Table 1. Parameters of each acquisition system and scanning results
|
Table 2. 3D topography acquisition data information of a charger
|
Table 3. 3D topography acquisition data information of a box
|
Table 4. 3D topography acquisition data information of a development board


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20