
Fengsui Wang, Lei Xiong, Yaping Qian. Multiscale Monocular Three-Dimensional Object Detection Algorithm Incorporating Instance Depth[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1612002
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1612002 (2023)

Fig. 1. Instance depth learning module
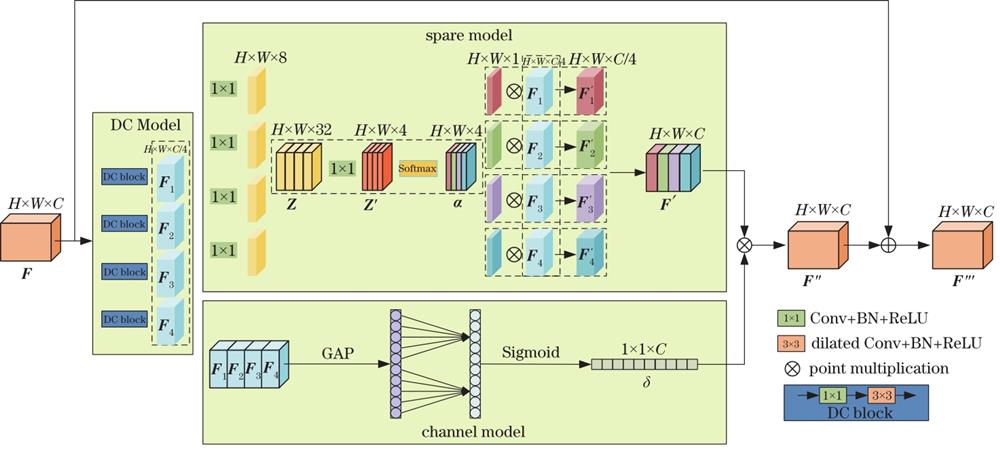
Fig. 2. Multiscale sensing module
Fig. 3. Network structural diagram
Fig. 4. Visualization results of KITTI
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Performance of the Car category on the KITTI test set
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Performance of the Car category on the KITTI validation set
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Adding Performance Comparison of Different Modules on KITTI validation set


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20