





Yufeng XU, Yuanzhi LIU, Minghui QIN, Hui ZHAO, Wei TAO. Global Low Bias Visual/inertial/weak-positional-aided Fusion Navigation System[J]. Acta Photonica Sinica, 2024, 53(4): 0415001
- Acta Photonica Sinica
- Vol. 53, Issue 4, 0415001 (2024)
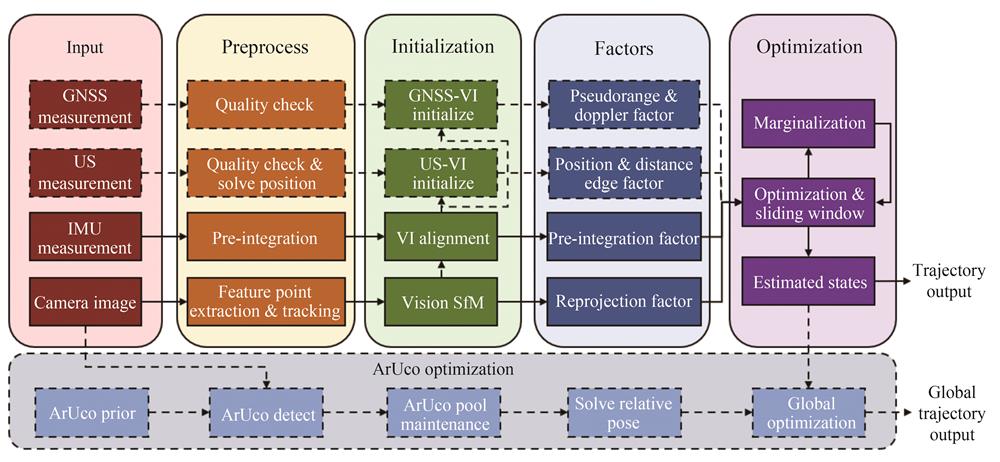
Fig. 1. Overall framework of our method
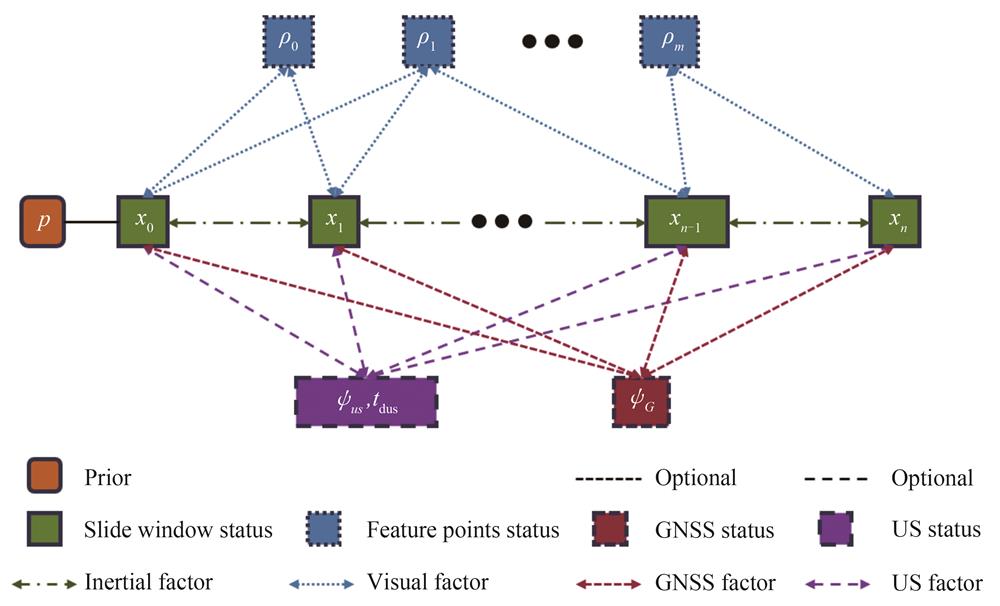
Fig. 2. Factor graph model
Fig. 3. ArUco target coordinate system definition and coordinate transformation between camera and ArUco target
Fig. 4. Diagram of the experimental site
Fig. 5. Wheeled robot platform and its sensor distribution
Fig. 6. Laser point cloud map generation and trajectory truth value generation
Fig. 7. Navigation result trajectories of each method under three scenarios
Fig. 8. Outdoor scene feature point tracking at night
Fig. 9. Examples of ArUco target distribution can be seen in the path and ArUco target detection
Fig. 10. Navigation trajectory comparison with or without ArUco assistance
|
Table 1. System hardware parameter
| |||||||||||||||||||||||||||||||||||
Table 2. Error test results under different experimental conditions
| |||||||||||
Table 3. Error test results with or without ArUco assistance
|
Table 4. The single processing run time of this method in different scenarios


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20