
Menghui Yu, Xining Cui, Linqigao Wu, Shiqian Wu. 3D Recognition Algorithm Based on Curvature Point Pair Features[J]. Laser & Optoelectronics Progress, 2023, 60(12): 1210020
- Laser & Optoelectronics Progress
- Vol. 60, Issue 12, 1210020 (2023)

Fig. 1. Schematic of curvature difference PPF
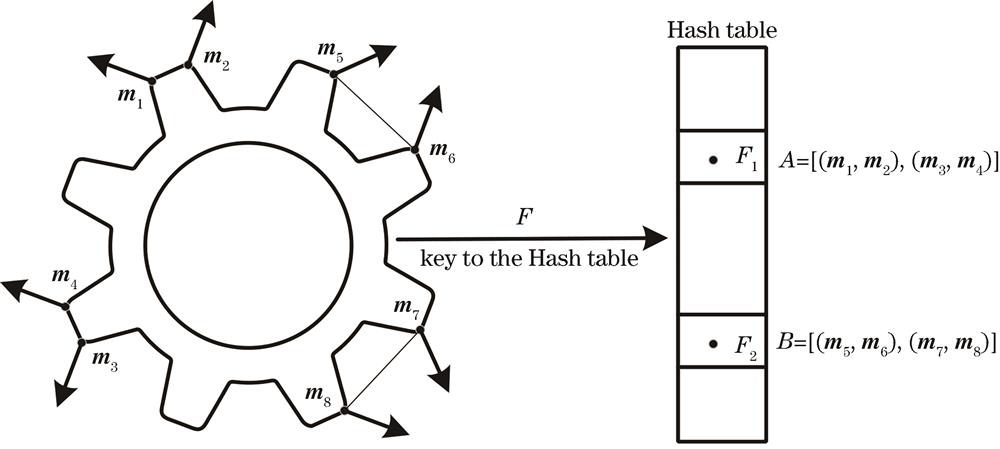
Fig. 2. Description of global model
Fig. 3. Transformation between model and scene coordinates
Fig. 4. Curvature and curvature histogram of buddha. (a) Curvature of buddha; (b) curvature histogram of buddha
Fig. 5. Visualization of weighted voting process
Fig. 6. Point clouds of models
Fig. 7. Matching effect of four algorithms. (a) Original PPF algorithm; (b) S-ICP algorithm; (c) curvature difference PPF algorithm; (d) curvature difference PPF algorithm with ICP
Fig. 8. Matching effect of four algorithms. (a) Original PPF algorithm; (b) S-ICP algorithm; (c) curvature difference PPF algorithm;(d) curvature difference PPF algorithm with ICP
Fig. 9. Process of scene segmentation. (a) Point cloud of scene; (b) grayscale image of point cloud mapping; (c) watershed segmentation; (d) candidate target
Fig. 10. Matching effect of four algorithms. (a) Original PPF algorithm; (b) S-ICP algorithm; (c) curvature difference PPF algorithm; (d) curvature difference PPF algorithm with ICP
Fig. 11. Intermediate result of point pair matching. (a) A point pair in scene; (b) original PPF algorithm; (c) curvature difference PPF algorithm
|
Table 1. Comparison of matching rates of algorithms
|
Table 2. Comparison of matching time of algorithms
|
Table 3. Comparison of matching rates of algorithms
|
Table 4. Comparison of matching time of algorithms
|
Table 5. Comparison of matching rates of algorithms
|
Table 6. Comparison of matching time of algorithms


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20