
Yuan Liu, Xiaoqing Zuo, Yongfa Li, Xu Yang, Dingyi Zhou, Kun Huang. Point Cloud Simplification Method Using von Mises-Fisher Distribution to Extract Features[J]. Laser & Optoelectronics Progress, 2023, 60(2): 0228002
- Laser & Optoelectronics Progress
- Vol. 60, Issue 2, 0228002 (2023)
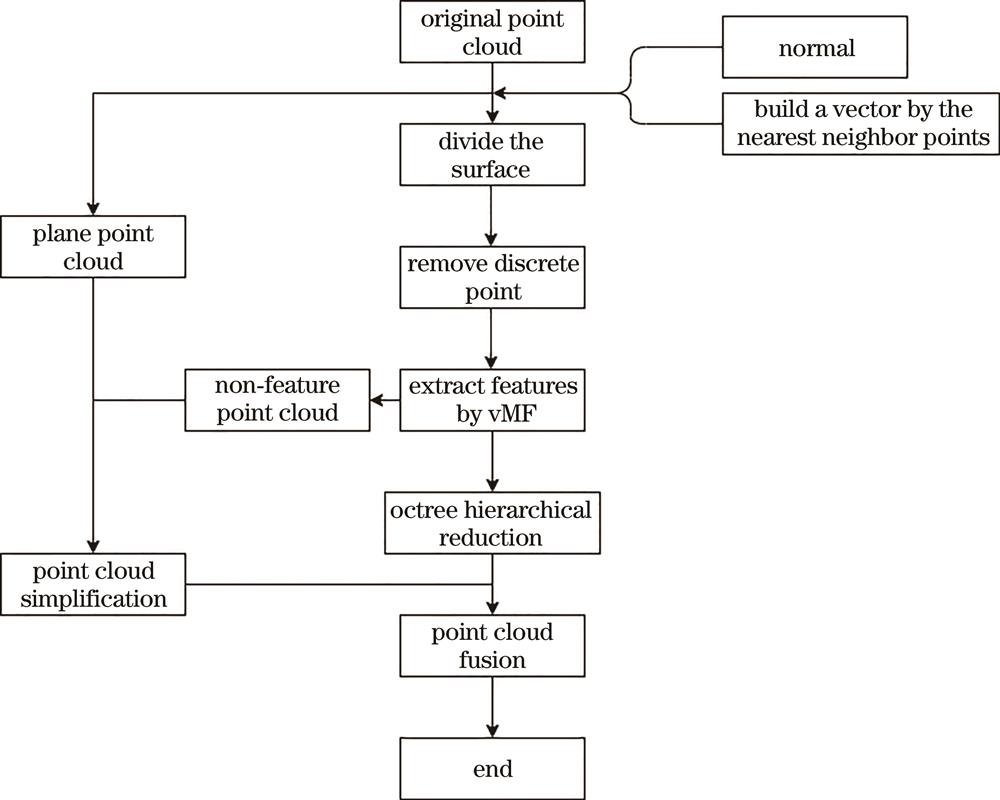
Fig. 1. Flowchart of proposed algorithm
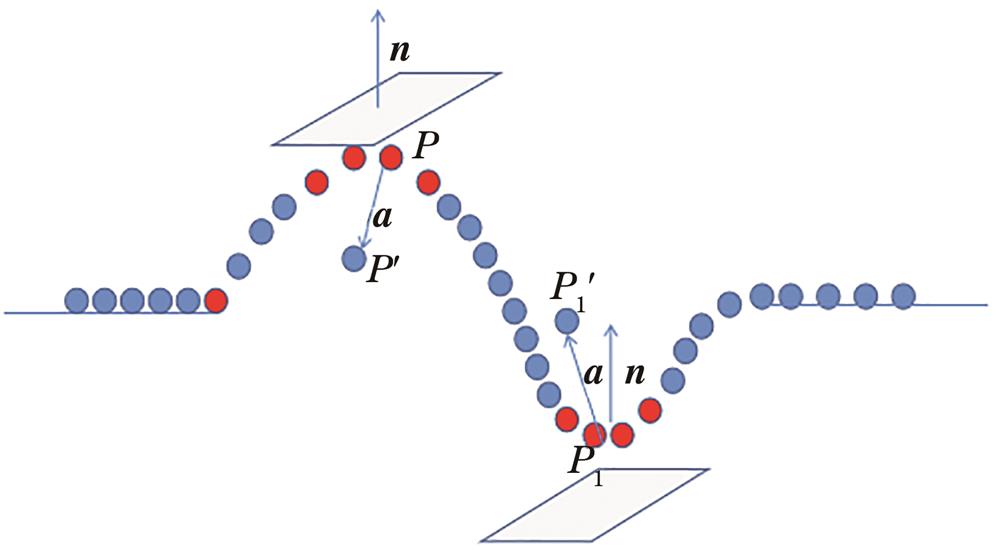
Fig. 2. Schematic of judging surface by the relationship between two vectors
Fig. 3. Priority of points extracted by vMF distribution
Fig. 4. Original point cloud. (a) bunny point cloud; (b) eaves point cloud
Fig. 5. Surface division result. (a) bunny surface type 1; (b) bunny surface type 2; (c) eaves surface type 1; (d) eaves surface type 2
Fig. 6. Extracted point cloud features of bunny. (a) Surface features in surface type 1; (b) surface features in surface type 2; (c) fused face feature; (d) line features in surface type 1; (e) line features in surface type 2; (f) fused line feature
Fig. 7. Extracted point cloud features of eaves. (a) Surface features in surface type 1; (b) surface features in surface type 2; (c) fused face feature; (d) line features in surface type 1; (e) line features in surface type 2; (f) plane line features; (g) fused line feature
Fig. 8. Section view comparison of bunny. (a) Original point cloud; (b) curvature feature method; (c) Hausdorff distance feature method; (d) proposed method
Fig. 9. Section view comparison of eaves. (a) Original point cloud; (b) curvature feature method; (c) Hausdorff distance feature method; (d) proposed method
Fig. 10. Simplification results of different algorithms. (a) (e) Curvature reduction results; (b) (f) raster reduction results; (c) (g) random reduction results; (d) (h) results of proposed algorithm
Fig. 11. Influence of original point cloud bottom on deviation result. (a) Bottom of original point cloud; (b) bottom of the model obtained by the curvature reduction algorithm; (c) deviation result
Fig. 12. Three-dimensional reconstruction of bunny.(a) Original point cloud; (b) curvature reduction result; (c) raster reduction result; (d) random reduction result; (e) result of proposed algorithm
Fig. 13. Three-dimensional reconstruction of eaves. (a) Original point cloud; (b) curvature reduction result; (c) raster reduction result; (d) random reduction result; (e) result of proposed algorithm
Fig. 14. 3D deviation maps. (a) (e) Deviation result of curvature reduction algorithm; (b) (f) deviation result of raster reduction algorithm; (c) (g) deviation result of random reduction algorithm; (d) (h) deviation result of proposed algorithm
| |||||||||||||||||||||||
Table 1. Simplification data of different algorithms
|
Table 2. Bunny error analysis table
|
Table 3. Eaves error analysis table


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20