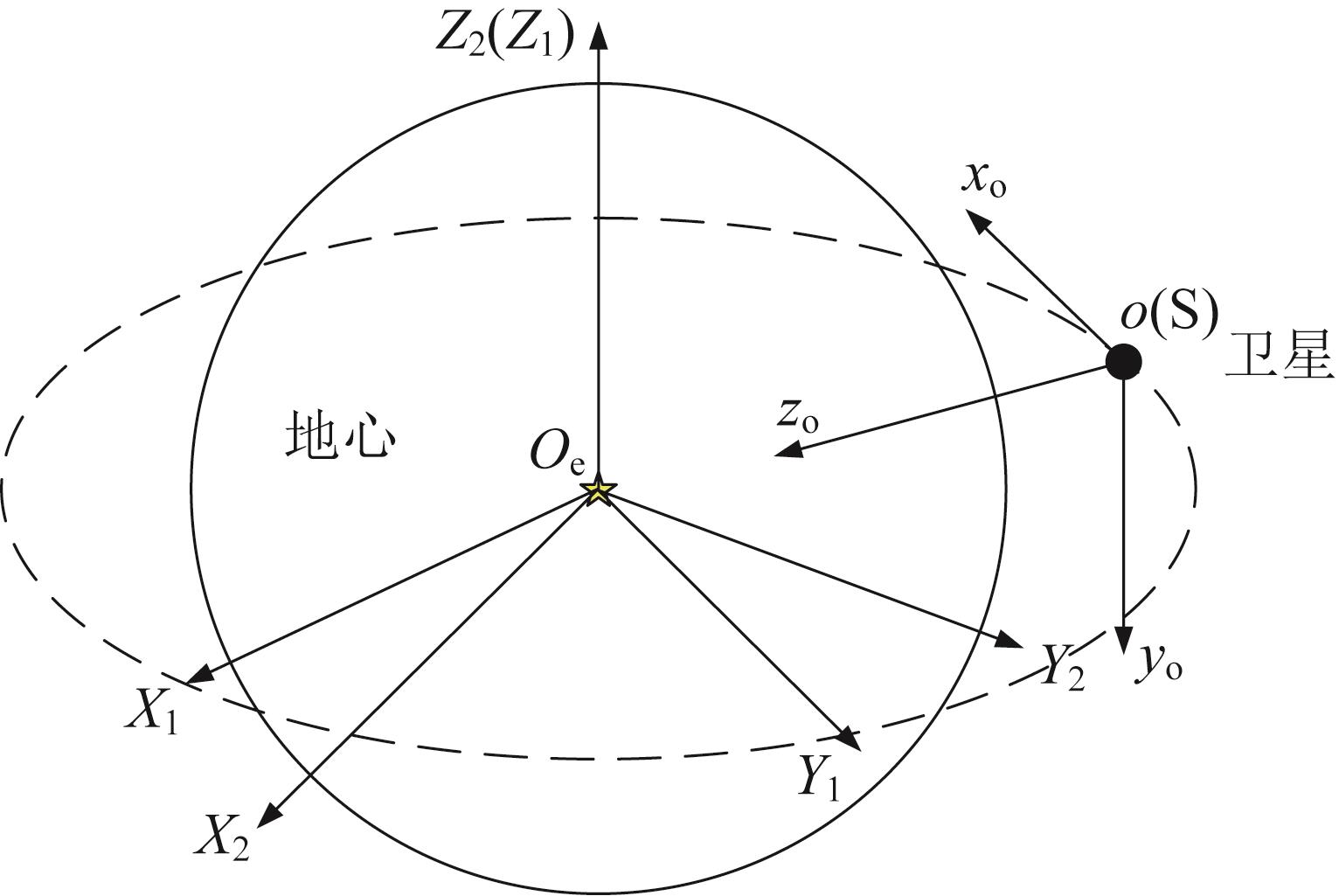
Fig. 1. Definition of the coordinate system
Fig. 2. Calculation of the observation window
Fig. 3. Schematic diagram of the coordinates of the target point P
Fig. 4. The angle between the target satellite and the earth center
Fig. 5. Flow chart of the optimal observation time calculation with Newton ’s dichotomy
Fig. 6. The rolling angle
Fig. 7. Flow chart of the multi-constraint and multi-objective task planning algorithm
物理含义 简写符号 备注 当前时间 ![]()
![]()
递推时长 ![]()
![]()
拉偏时间 T Interval 目标经度 L 目标纬度 B 目标高度 H 卫星轨道半长轴 a 卫星轨道偏心率 e 卫星轨道倾角 i 卫星轨道近地点幅角 w 卫星轨道升交点赤经 O mg 卫星轨道平近点角 M 地球引力常数 u 3.986×1014 地球赤道半径 R e 6 378 140 m 视场圆锥半角 ![]()
![]()
儒略世纪数 MechanicsTime0
Table 1. Tab.1
Variables commonly used 软硬件环境 参数 Matlab R2021b STK STK 11.6 CPU 12 th Gen Intel(R) Core(TM) i7-12700H @ 2.30 GHz 2.30 GHz 内存(RAM) 16.0 GB 操作系统 Windows 11
Table 2. Tab.2
Configurations of the software and hardware 参数名称 参数数值 当前时间(![]()
![]()
UTC时间2022年01月01日0时0分0秒 递推时长(![]()
![]()
10 800 s 拉偏时间(T Interval ) 1 500 s 目标经度(L ) 90°E 目标纬度(B ) 1°N 目标高度(H ) 0 m 卫星轨道半长轴(a ) 7 078 140 m 卫星轨道偏心率(e ) 0 卫星轨道倾角(i ) 0° 卫星轨道近地点幅角(w ) 0° 卫星轨道升交点赤经(O mg ) 0° 卫星轨道平近点角(M ) 0° 卫星轨道时刻 2022-01-01T0:0:0(UTC) 视场圆锥半角(Max A CHA ) 60°
Table 3. Tab.3
Parameter settings of the single target test 序号 开始时间(UTC) 结束时间(UTC) 持续
时间/s
最佳观测
时刻
1 2022-01-01
T0:51:59
2022-01-01
T1:0:11
492 2022-01-01
T0:56:5
2 2022-01-01
T2:38:03
2022-01-01
T2:46:15
492 2022-01-01
T2:42:9
Table 4. Tab.4
Simulation output by the single objective algorithm 序号 开始时间(UTC) 结束时间(UTC) 持续
时间/s
最佳观测
时刻
1 2022-01-01
T0:51:58.967
2022-01-01
T1:0:11.047
492.08 2022-01-01
T0:56:5.007
2 2022-01-01
T2:38:03.043
2022-01-01
T2:46:15.214
492.171 2022-01-01
T2:42:9.129
Table 5. Tab.5
Simulation output by the STK 序号 算法
名称 算法耗时/s 仿真步长Δt /s 递推时长ΔT /s 单步平均耗时/s 结果精度/s 1 提出
算法 0.011 205 10 800 <1 2 跟踪传播法 3.207 6 1 10 800 0.000 297 1
Table 6. Tab.6
Comparison of time consumption between the proposed algorithm and the tracking propagation method 目标编号 目标名称 经度L 纬度B 高程H 优先级 1 Tar1 10 10 0 1 2 Tar2 20 20 0 2 3 Tar3 30 30 0 3 4 Tar4 40 40 0 4 5 Tar5 50 50 0 5 6 Tar6 60 60 0 6 7 Tar7 70 10 0 7 8 Tar8 80 20 0 8 9 Tar9 90 30 0 9 10 Tar10 100 40 0 10
Table 7. Tab.7
Longitude and latitude of multiple target points 参数名称 参数值 最小任务间隔时间 3 600 s 最小重访周期 43 200 s 当前时间(![]()
![]()
2022-01-01T0:0:0(UTC) 递推时长(![]()
![]()
259 200 s 拉偏时间(T Interval ) 1 500 s 卫星编号 1 卫星轨道半长轴(a ) 6 878 140 m 卫星轨道偏心率(e ) 0 卫星轨道倾角(i ) 35° 卫星轨道近地点幅角(w ) 0° 卫星轨道升交点赤经(O mg ) 0° 卫星轨道平近点角(M ) 170° 卫星轨道时刻 2022-01-01T0:0:0(UTC) 视场圆锥半角(Max A CHA ) 60°
Table 8. Tab.8
Parameter settings of the multi-objective test 任务序号 目标编号 卫星编号 开始时间(UTC) 结束时间(UTC) 持续时间/s 优先级 1 1、2 1 2022-01-01
T03:03:19
2022-01-01
T03:07:24
245.4 1、2 2 7、8、9 1 2022-01-01
T13:28:55
2022-01-01
T13:40:13
677.7 7、8、9 3 1 1 2022-01-01
T16:36:31
2022-01-01
T16:38:53
142.7 1 4 2、3、4 1 2022-01-01
T18:19:08
2022-01-01
T18:28:51
582.4 2、3、4 5 7、8 1 2022-01-02
T13:07:20
2022-01-02
T13:15:18
478.0 7、8 6 9、10 1 2022-01-02
T14:54:24
2022-01-02
T15:01:20
415.7 9、10 7 1、2、3 1 2022-01-02
T17:53:48
2022-01-02
T18:05:21
693.7 1、2、3 8 4 1 2022-01-02
T19:43:59
2022-01-02
T19:47:53
234.0 4 9 7 1 2022-01-03
T12:45:58
2022-01-03
T12:49:48
230.0 7 10 8、9、10 1 2022-01-03
T14:29:33
2022-01-03
T14:39:26
592.4 8、9、10 11 1、2、3 1 2022-01-03
T17:31:54
2022-01-03
T17:43:25
691.0 1、2、3 12 4 1 2022-01-03
T19:22:25
2022-01-03
T19:26:08
223.4 4
Table 9. Tab.9
Simulation output of the multi-constraint and multi-objective algorithm