
Ping CHEN, Xuejun LEI, Can LI, Yiliang HU, Shuang CHEN. Assembly of countersunk-hole parts based on 3D pose estimation and impedance control[J]. Optics and Precision Engineering, 2022, 30(22): 2889
- Optics and Precision Engineering
- Vol. 30, Issue 22, 2889 (2022)
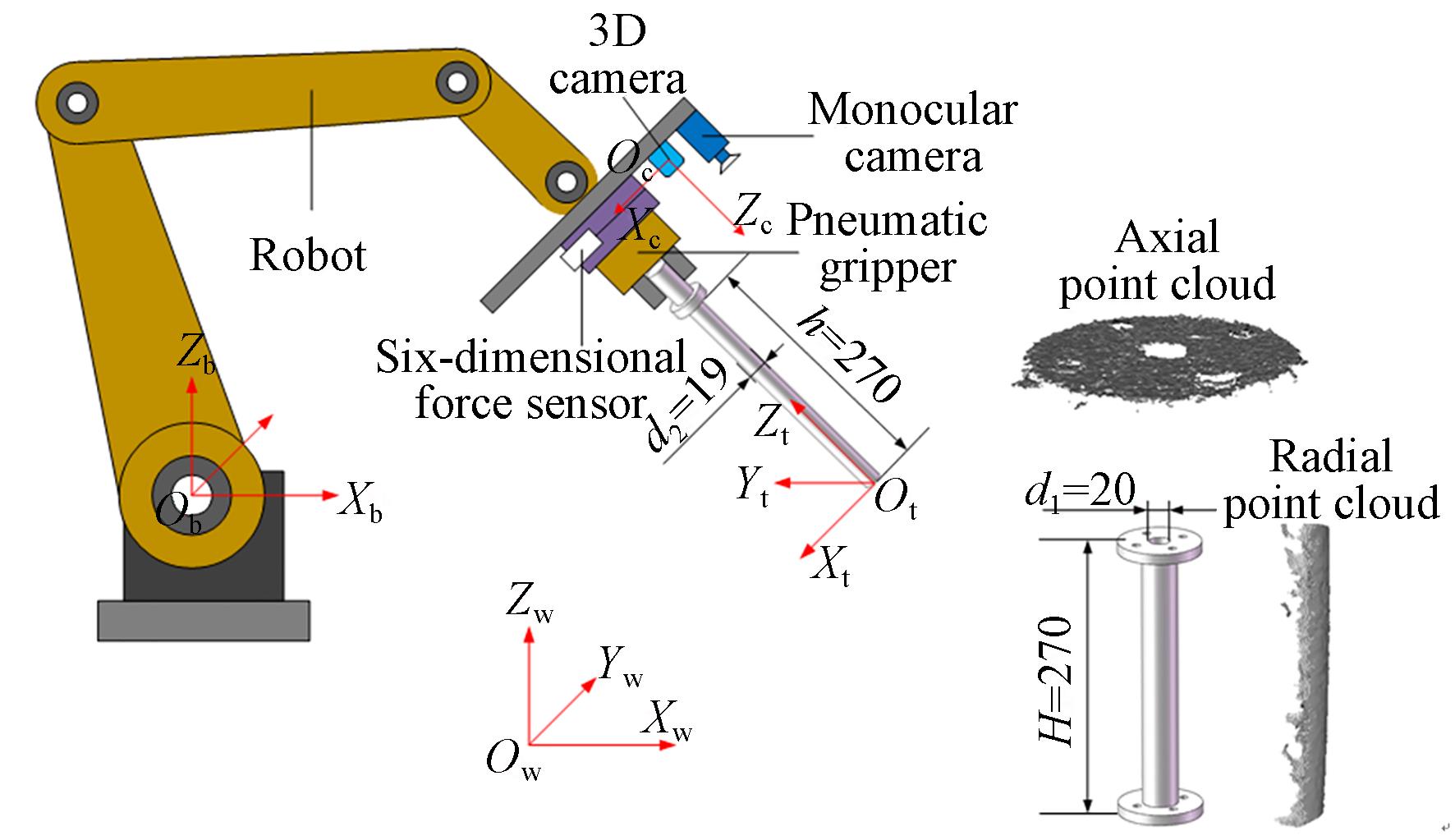
Fig. 1. Platform of robotic assembly

Fig. 2. Outliers and noise of point cloud
Fig. 3. Results of supervoxel segmentation and CPC clustering
Fig. 4. Results of supervoxel segmentation
Fig. 5. Outliers and noise of the edge
Fig. 6. Schematic diagram of the weight function
Fig. 7. Results of plane fitting
Fig. 8. Point cloud
Fig. 9. Inliers of countersunk-hole
Fig. 10. Profile of countersunk-hole
Fig. 11. Contact force generated when the cylindrical shaft part contacts the hole wall
Fig. 12. Platform of countersunk-hole part assembly
Fig. 13. Comparison of plane fitting results
Fig. 14. Comparison of plane fitting results under outliers
Fig. 15. Process of countersunk hole pose estimation
Fig. 16. Assembly process
Fig. 17. Force and torque
|
Table 1. Comparison of plane fitting results
|
Table 2. Comparison of plane fitting results under outliers
|
Table 3. Error of different postures


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20