
Rong Jiang, Pan Zhu, Xinglin Zhou, Lu Liu. Three-Dimensional Pavement Texture Information Acquisition Based on Binocular Vision Algorithm[J]. Laser & Optoelectronics Progress, 2022, 59(14): 1415026
- Laser & Optoelectronics Progress
- Vol. 59, Issue 14, 1415026 (2022)
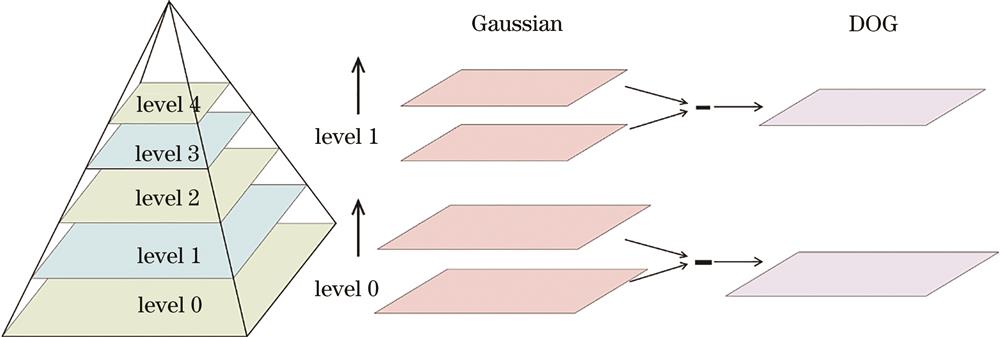
Fig. 1. Image pyramid model and DOG pyramid generation process
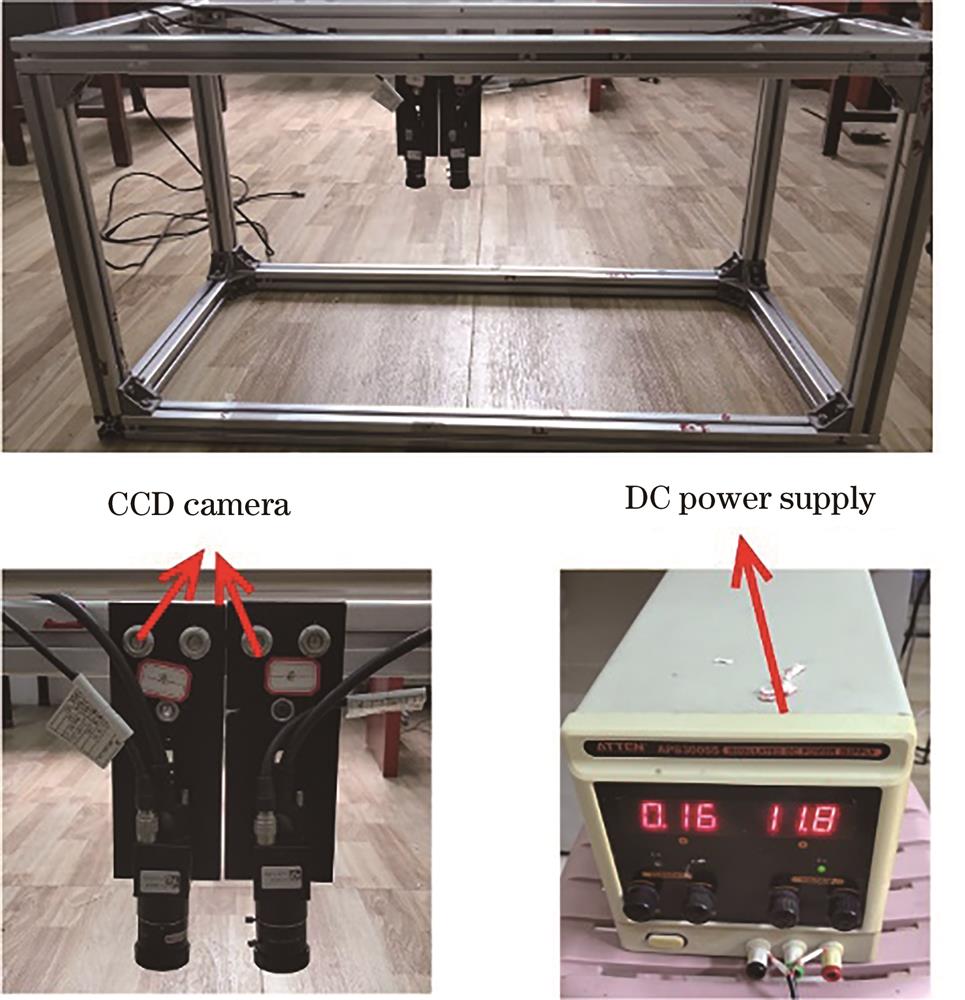
Fig. 2. Binocular vision measurement experimental platform
Fig. 3. Working flow chart of binocular vision measurement system
Fig. 4. Checkerboard calibration images
Fig. 5. Image preprocessing of asphalt sample
Fig. 6. Sample and experimental site. (a) Sample diagram; (b) binocular measurement; (c) laser measurement
Fig. 7. Disparity maps obtained by different cost calculation methods. (a) Census; (b) Census+color information; (c) color information+gradient information
Fig. 8. Disparity maps obtained by different cost aggregation methods. (a) Guided filtering; (b) segmentation tree; (c) box filtering
Fig. 9. Parallax graphs obtained by the different algorithms. (a) SGBM; (b) algorithm before introducing cross scale aggregation model; (c) proposed algorithm
Fig. 10. Three dimensional model of laser measurement and the proposed algorithm measurement. (a) Laser measurement; (b) proposed algorithm measurement
|
Table 1. Detailed equipment parameters of the binocular vision measurement platform
|
Table 2. MTD of asphalt pavement samples


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20