
Zihui Zhang, Yunlan Guan. Point-Cloud Data Reduction Based on Neighborhood-Point Position Feature[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1628005
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1628005 (2023)
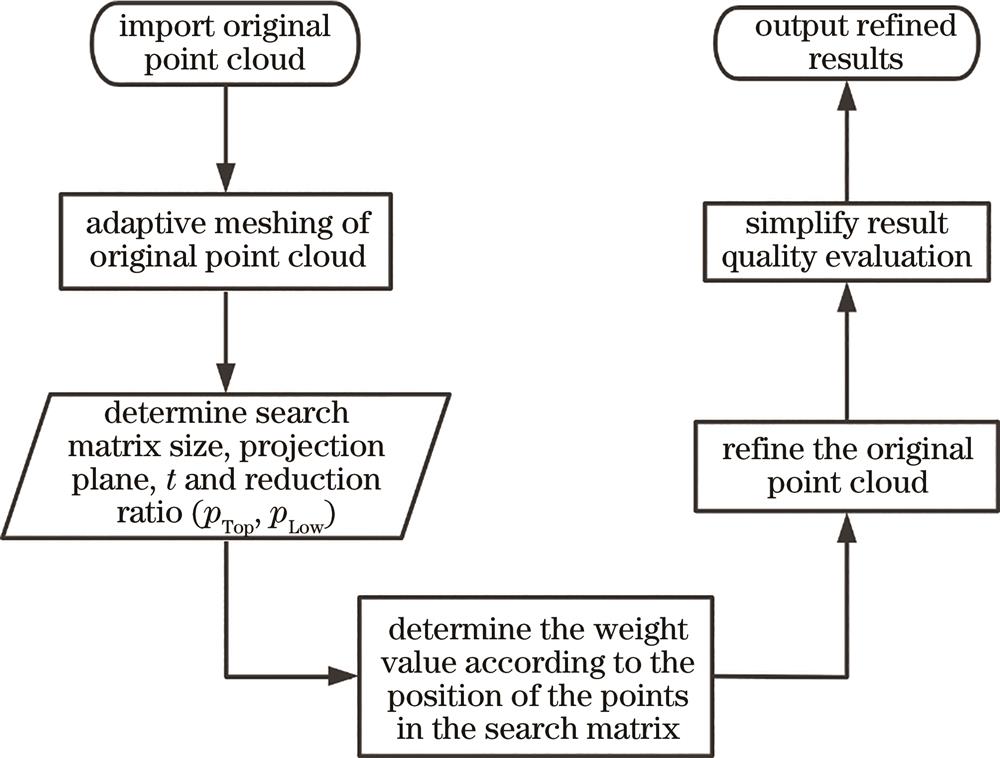
Fig. 1. Algorithm flow
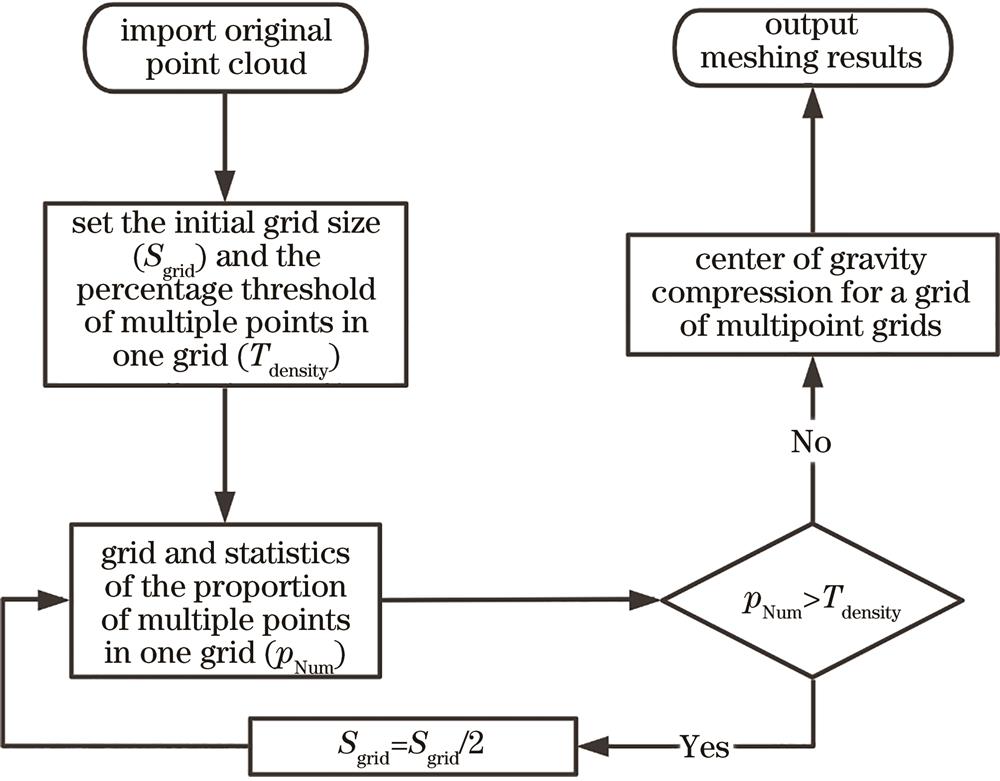
Fig. 2. Gridding flow chart
Fig. 3. Schematic diagram of gridding results
Fig. 4. Point cloud of point P (red five pointed star) and y=Y±1 area
Fig. 5. Point cloud of point P and points included in Pup (green) and Pdown (blue)
Fig. 6. Weight distribution of points within search range when r is 7
Fig. 7. Data of original point cloud
Fig. 8. Results of skull point cloud reduction. (a) Original model; (b) proposed algorithm; (c) curvature sampling; (d) uniform grid method; (e) random sampling method
Fig. 9. Detail display of head area and tooth area. (a) Original model; (b) proposed algorithm; (c) curvature sampling; (d) uniform grid method; (e) random sampling method
Fig. 10. Results of bunny point cloud simplification. (a) Original model; (b) proposed algorithm; (c) curvature sampling; (d) uniform grid method; (e) random sampling method
Fig. 11. Child point cloud reduction results. (a) Original model; (b) proposed algorithm; (c) curvature sampling; (d) uniform grid method; (e) random sampling method
Fig. 12. Quality evaluation of skull point cloud simplified result
Fig. 13. Quality evaluation of bunny point cloud simplified result
Fig. 14. Quality evaluation of child point cloud simplified result
|
Table 1. Meshing parameters and results
|
Table 2. Simplified parameters


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20