
Jinmiao Yu, Jingjing Wu. Betel Nut Pose Recognition and Localization System Based on Structured Light 3D Vision[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1615010
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1615010 (2023)

Fig. 1. Structured light 3D vision sensing system and coordinate system relationship
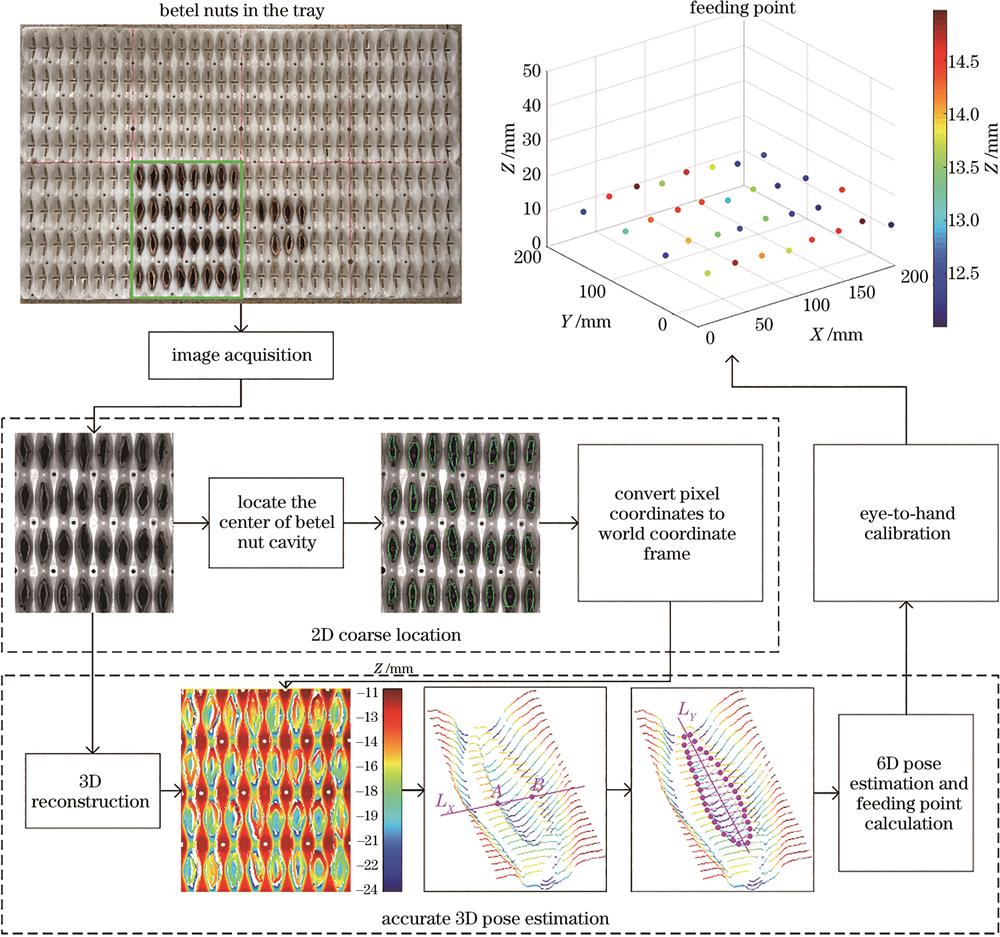
Fig. 2. Flow chart of betel nut poses recognition and localization
Fig. 3. The process of PSP 3D reconstruction
Fig. 4. Definition of attitude angles of betel nut and four types of betel nut. (a) Definition of attitude angles; (b) normal; (c) over-rolling; (d) upturned; (e) brine-stained
Fig. 5. Flow chart of attitude recognition and positioning algorithm
Fig. 6. Process of pose estimation
Fig. 7. Regional extraction demonstration of the betel nut brine zone
Fig. 8. Cross section of areca nut point cloud
Fig. 9. Examples of 3D reconstruction systems and robot calibration
Fig. 10. Confusion matrices
Fig. 11. Experimental platform
Fig. 12. Three groups of pose estimation experiment
Fig. 13. Three typical postures of the betel nut handling process. (a) Over-rolling; (b) upturned; (c) brine-stained
Fig. 14. Confusion matrix obtained by the proposed pose estimation algorithm
Fig. 15. Experimental process. (a) 3D reconstruction process; (b) acquisition process of actual coordinates of feeding points; (c) betel nuts to be fed
Fig. 16. Analysis of location experimental results. (a) Location of feeding point; (b) errors of X, Y, and Z coordinates
|
Table 1. Detection results obtained by the proposed 3D pose estimation algorithm
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Pose estimation accuracy and work efficiency in 10 groups
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Experimental results of the location accuracy evaluation


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20