
Hu Zhou, Dengdeng Shu, Chongjun Wu, Qibing Wang. Full Runout Measurement of DD Motor End Face Based on Point Cloud Drive[J]. Laser & Optoelectronics Progress, 2023, 60(12): 1215006
- Laser & Optoelectronics Progress
- Vol. 60, Issue 12, 1215006 (2023)
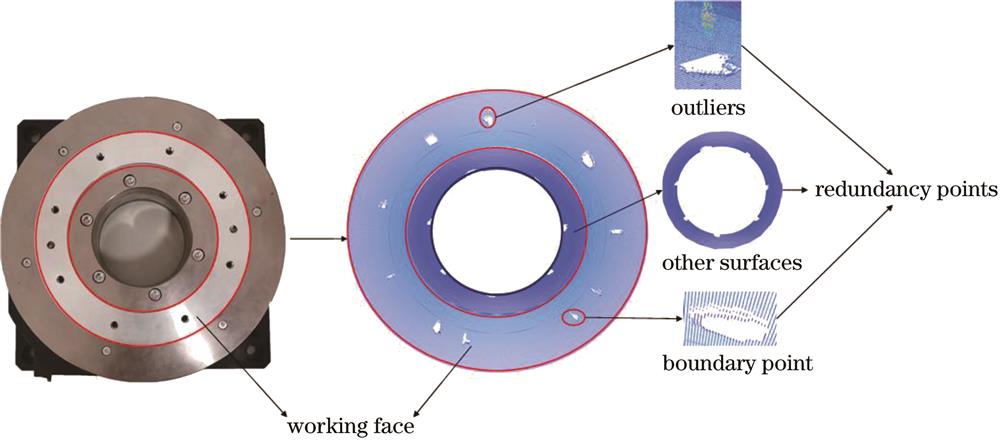
Fig. 1. Point cloud of DD motor
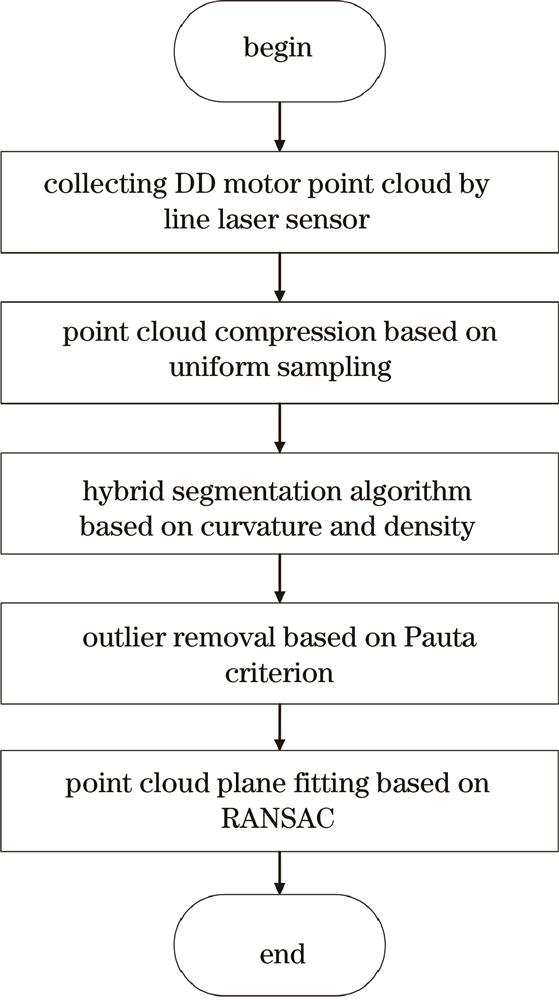
Fig. 2. Flow chart of proposed method
Fig. 3. Experimental platform and collected point cloud
Fig. 4. Schematic diagram of point cloud density
Fig. 5. Flow chart of hybrid segmentation algorithm based on curvature and density
Fig. 6. Anomaly analysis of point cloud. (a) Segmented working face point cloud; (b) point cloud line chart
Fig. 7. Verification diagrams of normal distribution of point cloud. (a) Q-Q graph of point cloud; (b) frequency histogram
Fig. 8. Point cloud compression results
Fig. 9. Results of point cloud segmentation. (a)
Fig. 10. Point cloud after outlier elimination and corresponding line chart. (a) Point cloud after outlier elimination; (b) point cloud line chart
Fig. 11. Measurement result
Fig. 12. Schematic diagram of dial indicator measurement
|
Table 1. Parameters of linear laser sensor
|
Table 2. Comparison of RANSAC fitting results under different parameters
|
Table 3. Measurement data of left end of bolt hole
|
Table 4. Measurement data of right end of bolt hole


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20