
Ling-fei SHEN, Ting-wei FAN, Gu-yu HU, Jie WANG, Da-wei ZHANG, Tian-hua ZHOU. Research on Underwater Four-point Monocular Ranging based on Monte Carlo Simulation[J]. Study On Optical Communications, 2023, 49(4): 60
- Study On Optical Communications
- Vol. 49, Issue 4, 60 (2023)
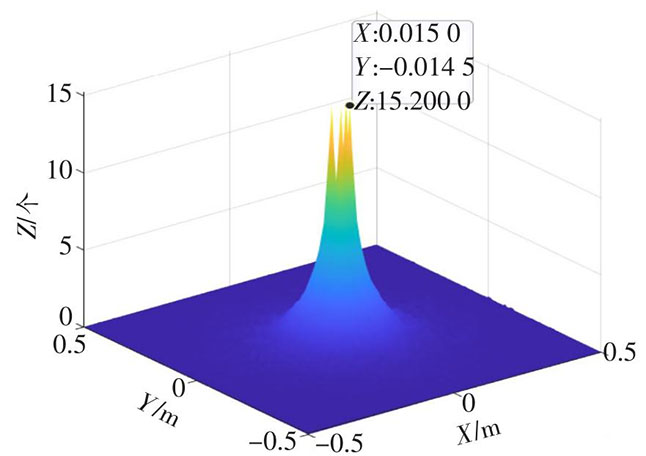
Fig. 1. ![]()
![]()

Fig. 2. Simulated laser spots
Fig. 3. Pinhole camera model
Fig. 4. Monocular ranging flowchart
Fig. 5. Image enhancement of underwater picture of laboratory pool
Fig. 6. Image enhancement of underwater picture of external field anechoic pool
Fig. 7. The ideal model for subpixel edge detection
Fig. 8. Acquirement of spot centroid
Fig. 9. Fit contours with subpixel edges detection
Fig. 10. Integrated system of underwater laser communication ranging and measurement
Fig. 11. Trapezoidal optical beacon
Fig. 12. The process of a monocular ranging procedure
|
Table 1. Optical parameters of seawater with green light 532 nm
|
Table 2. The monocular ranging algorithm for this article
|
Table 3. Comparison of underwater monocular ranging algorithms


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20