
Hui Chen, Yibo Wang, Heping Huang, Fei Yan, Yunfeng Huang. Multiview Point Cloud Registration Method for Nonspherical Objects Based on Manifold Clustering[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1615005
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1615005 (2023)

Fig. 1. Comparison between Euclidean distance and geodesic distance. (a) Euclidean distance; (b) geodesic distance
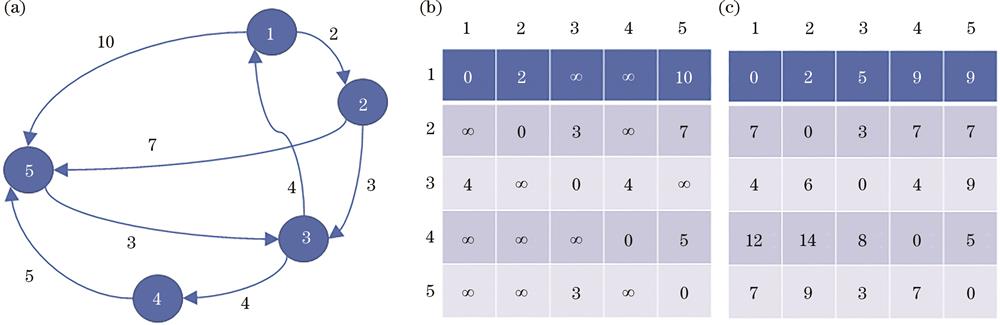
Fig. 2. Calculation method of geodesic distance. (a) Directed weighted graph in space; (b) weight between two points; (c) shortest path between two points
Fig. 3. Flowchart of the thermal gradient method
Fig. 4. Selection of neighbourhood feature points. (a) Curve with little surface change; (b) curve with large surface changes
Fig. 5. Flowchart of fine registration
Fig. 6. Cross-section of multiview point cloud registration. (a) Multiview point cloud registration model; (b) the initial cross-section of fine registration; (c) the results of the MAICP method; (d) the results of the LRS method; (e) the results of the JRMPC method; (f) the results of K-means method; (g) the results of the proposed method
Fig. 7. Comparison of the local effect of cross-section. (a) The local magnification effect of the registration result of the Dragon model obtained by K-means method; (b) the local magnification effect of the registration result of the Dragon model obtained by the proposed method; (c) the local magnification effect of the registration result of the Chicken model obtained by JRMPC method; (d) the local magnification effect of the registration result of the Chicken model obtained by the proposed method
|
Table 1. Point cloud data information
|
Table 2. Accuracy comparison of different methods
|
Table 3. Efficiency comparison of two kinds of geodesic distance matrix calculation methods
|
Table 4. Efficiency comparison of different registration methods
|
Table 5. Robustness comparison of different methods for the Bunny dataset
|
Table 6. Robustness comparison of different methods for the Dragon dataset
|
Table 7. Robustness comparison of different methods for the Happy dataset
|
Table 8. Robustness comparison of different methods for the Chicken dataset


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20