
Rujun Chen, Yunwei Pu, Jiahou Zhou, Jun Li, Xuefeng Wang. Small Water Body Extraction Based on GF-2 Image[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1628002
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1628002 (2023)

Fig. 1. Schematic of the study area
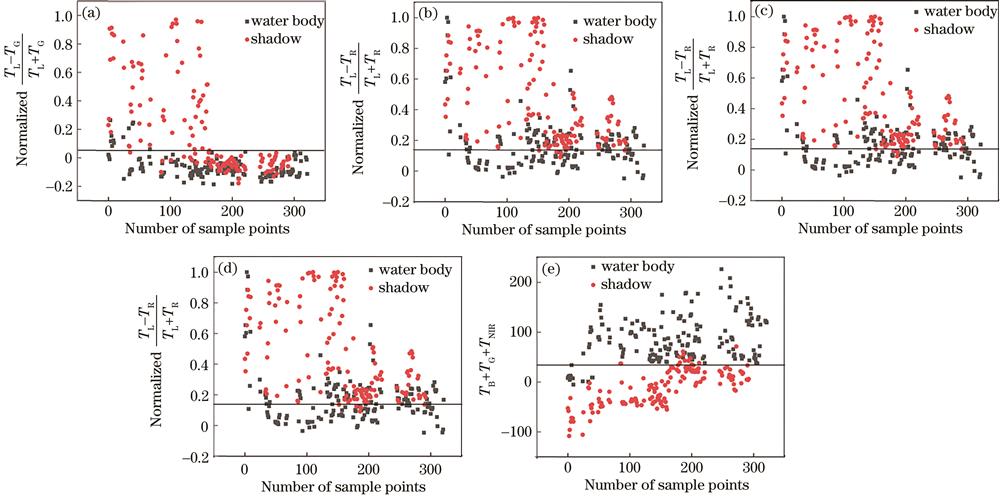
Fig. 2. Analysis between brightness value and gray scale value at each band and SWI analysis diagram. (a) Analysis diagram between brightness value and gray scale value at green band (G); (b) analysis diagram between brightness value and gray scale value at red band (R); (c) analysis diagram between brightness value and gray scale value at blue band (B); (d) analysis diagram between brightness value and gray scale value at near-infrared band (NIR); (e) SWI analysis diagram
Fig. 3. Overlay image results after different algorithms distinguish water bodies from shadows and other ground objects. (a) Manual labeled shadow and water body; (b) LGR segmentation result; (c) SWI segmentation result
Fig. 4. Technology roadmap
Fig. 5. Water extraction results of different methods. (a) Decision tree; (b) SVM; (c) RF; (d) CNN; (e) NDWI+NIR; (f) proposed method; (g) manual visual interpretation
|
Table 1. Technical indexes of payload of GF-2 satellite
|
Table 2. Water extraction area and extraction difference
|
Table 3. Water extraction accuracy of various methods


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20