
Nan Chi, Fangchen Hu, "Nonlinear adaptive filters for high-speed LED based underwater visible light communication [Invited]," Chin. Opt. Lett. 17, 100011 (2019)
- Chinese Optics Letters
- Vol. 17, Issue 10, 100011 (2019)
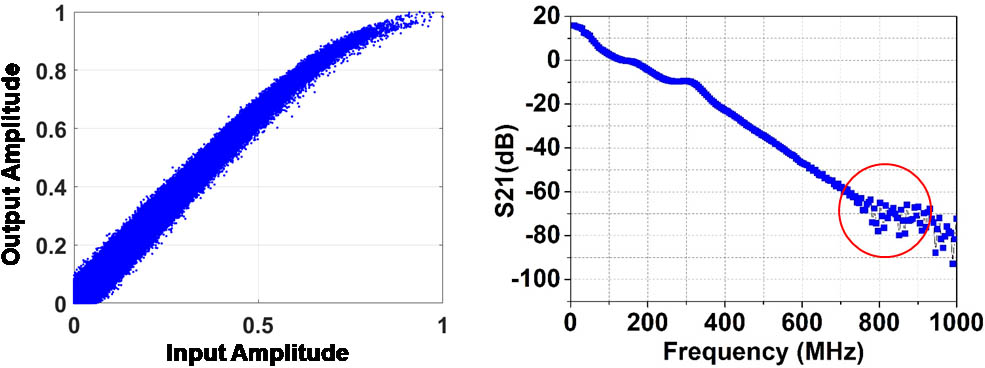
Fig. 1. Nonlinear response of the UVLC system in the time domain and frequency domain.

Fig. 2. Schematic diagram of the RLS-based Volterra filter.
Fig. 3. Schematic diagram of the LMS-based DP filter.
Fig. 4. Schematic diagram of the LMS-based Volterra filter.
Fig. 5. Computational complexity versus number of taps.
Fig. 6. Block diagram of the UVLC system.
Fig. 7. BER performance versus bandwidth and number of taps for different nonlinear adaptive filters in the UVLC system.
Fig. 8. Time-domain waveform comparison of the transmitted signal and received signal after the nonlinear adaptive filter and the DNN proposed by Ref. [3].
Fig. 9. Spectral response of (a) transmitted signal, (b) received signal without nonlinear equalization, (c) signal with RLS–Volterra nonlinear equalization, (d) signal with LMS–Volterra nonlinear equalization, (e) signal with LMS–DP nonlinear equalization, and (f) signal with the DNN proposed by Ref. [3].
Fig. 10. Error convergence curve of the RLS–Volterra and LMS–Volterra filters.
Fig. 11. BER versus bandwidth for the VLC and UVLC systems.
|
Table 1. Computational Complexity


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20