
Taifei Zhao, Yi Zhao, Yang Liu, Wen Zhang. Ultraviolet Unmanned Aerial Vehicle Alliance Round-Up Algorithm Collaborative Formation[J]. Laser & Optoelectronics Progress, 2023, 60(15): 1506006
- Laser & Optoelectronics Progress
- Vol. 60, Issue 15, 1506006 (2023)
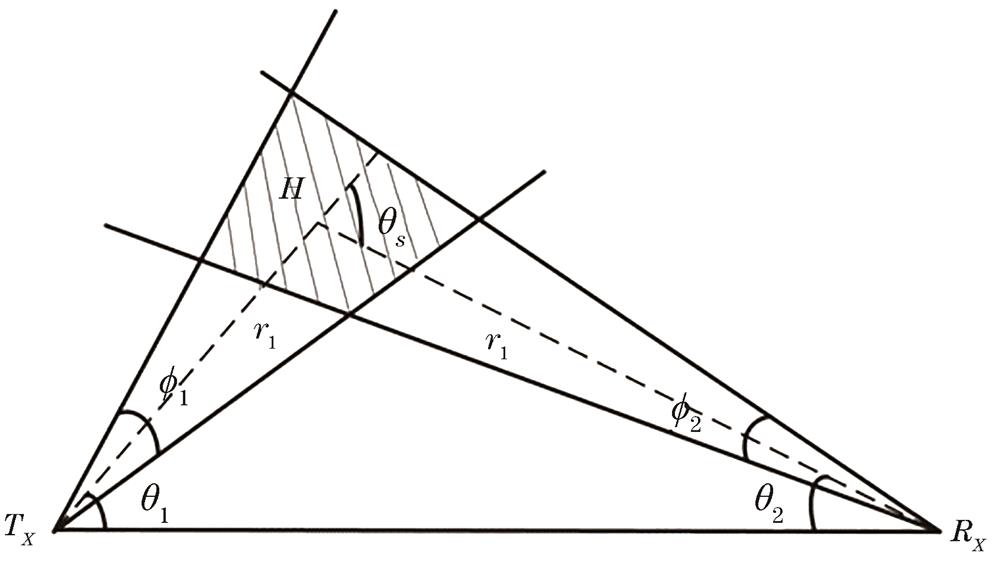
Fig. 1. Non-line-of sight-scattering communication model
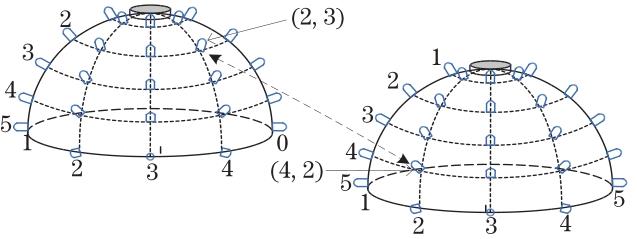
Fig. 2. Schematic diagram of hemispherical UV LED communication model
Fig. 3. Structure diagram of the alliance
Fig. 4. Area minimization strategy flowchart. (a) Global area minimization policy block diagram; (b) local area minimization policy block diagram
Fig. 5. Flowchart of area minimization strategies generated based on federation
Fig. 6. Simulation results of UAV formation rounding up target escapees in two-dimensional space. (a) Without alliance (19th iteration); (b) without alliance (27th iteration); (c) with alliance (19th iteration); (d) with alliance (27th iteration)
Fig. 7. Simulation result of UAV formation rounding up target escapees in three-dimensional space. (a) Without alliance (11th iteration); (b) without alliance (30th iteration); (c) with alliance (11th iteration); (d) with alliance (30th iteration)
Fig. 8. Energy consumption of UAV formation rounding up target. (a) Two-dimensional; (b) three-dimensional
Fig. 9. Number of iterations of the successful round-up target by the UAV formation. (a) Two-dimensional; (b) three-dimensional
Fig. 10. Minimum distance between the target escapee and all UAV formation, when ratio of pursuer number to target number is different in two-dimensional space. (a) 8∶3; (b) 9∶3; (c) 10∶3
Fig. 11. Minimum distance between the target escapee and all UAV formation, when ratio of pursuer number to target number is different in three-dimensional space. (a) 8∶2; (b) 9∶2; (c) 10∶2


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20