GaN Optoelectronic Integration International Cooperation Joint Laboratory of Jiangsu Province, Nanjing University of Posts and Telecommunications, Nanjing 210003, China
【AIGC One Sentence Reading】:A mobile all-light communication network with full-duplex real-time video capability is achieved, showing robustness even during fast motion.
【AIGC Short Abstract】:A mobile all-light communication network using white and blue lights is proposed, integrating visual tracking for dynamic node alignment. It achieves robust TCP connections with low packet loss and delay, enabling full-duplex real-time video communication. The network has potential for diverse service provision across various environments.
Note: This section is automatically generated by AI . The website and platform operators shall not be liable for any commercial or legal consequences arising from your use of AI generated content on this website. Please be aware of this.
Abstract
Integrating mobile nodes into wireless light communication networks requires overcoming the challenges of light alignment. Here, we use white and blue lights to establish an all-light communication network with mobile light communication (MLC) links for diverse environments. The integration of visual tracking with a gimbal stabilizer enables tracking and pointing mobile nodes during motion. The MLC achieves a robust transmission control protocol (TCP) connection, maintaining a packet loss of 6.8% and a delay of 48 ms even when the gimbal rotates at speeds exceeding 91.6 deg/s. The network demonstrates full-duplex real-time video communication between mobile and fixed nodes. Furthermore, a minimum requirement for establishing a TCP-based MLC link is presented: the motion time over a given path should exceed the sum of the TCP transmission delay, visual tracking delay, and gimbal rotation time. The mobile all-light communication network holds significant potential for providing various services across diverse environments to different users simultaneously.
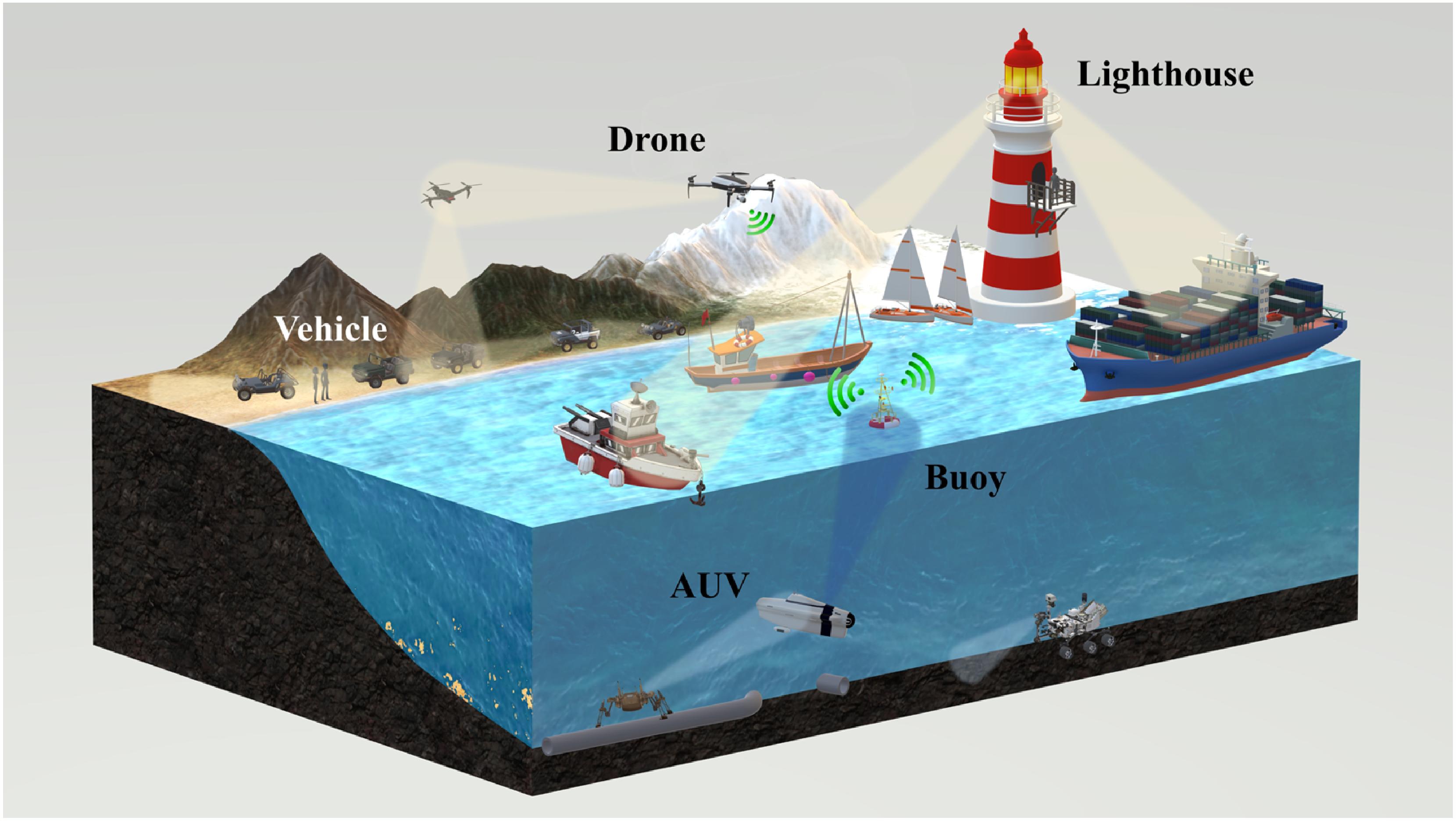
In scenarios where conventional communication links among air, surface, and underwater are blocked, an all-light communication network that combines different spectra of light enables seamless connectivity across different environments[1,2]. Transmission control protocol (TCP) can be used in such networks to establish reliable bidirectional data transmission, where drones, vehicles, and underwater equipment act as mobile data nodes. Figure 1 shows a vision of the all-light communication network, which contains both mobile and fixed nodes. Blue light is used for transmitting data between underwater nodes because of its lower transmission loss in seawater. White light is used by a lighthouse for illumination purposes and to establish communications with buoys and ships. Under the sea, an unmanned robot conveys the collected data via a searchlight to an autonomous underwater vehicle (AUV), which acts as a relay node to forward the data to a buoy. On the surface, vehicles are connected to each other by light and can also be networked with drones. In the air, drones access the network through light and wireless fidelity (Wi-Fi), thus interconnecting with the vehicles and underwater equipment. All nodes accessing the network can share information, which is key for providing various services across diverse environments to different users at once. By optimizing the deployment locations of these mobile nodes, the coverage of the network can be significantly improved. However, conventional fixed light communications are unable to maintain light alignment while the transceiver is moving, limiting the flexibility of mobile network nodes[3–6]. Therefore, integrating mobile nodes to participate in wireless light communication networks is particularly crucial for use with such mobile equipments[7–11].
Figure 1.Vision of the all-light communication network, where both mobile and fixed nodes are supported.
In recent years, mobile light communication (MLC) has received much attention as a research subject[12–18]. Khan et al. proposed a scheme to automatically maintain line-of-sight (LOS) alignment between two nodes traveling in a straight line by mechanically steering a transceiver[19]. Liu et al. developed a receiver with a high-speed camera and a two-axis gimbal for automatic transceiver alignment by detecting beacon light. This system achieved a 25 Mbps transmission with a bit error rate (BER) of below over a 3 m wireless light communication link, even when tracking the transmitter moving horizontally at 1 m/s ()[20]. In 2020, Zhang et al. reported a tracking system with multiple beacon lasers that achieved faster convergence than the existing methods did. This was achieved by constraining the beam divergence of the main laser for communication purposes and employing a maximum likelihood estimation method to reduce the tracking error[21]. However, these beacon light-based tracking systems are prone to receiving interference from communication light and are difficult to use in all-light communication networks, which merge various light sources. In 2024, Li et al. designed an optics-driven drone system based on artificial intelligence and laser wireless power transmission technology, where visual tracking and pointing algorithms were used to achieve stable acquisition, tracking, and pointing[22]. This work achieves unidirectional control as the weight of the equipment precludes mobile interconnection with aerial nodes. Recent research has focused on simplex mobile transmission links, which restrict data exchange-based protocols and hinder relay networking among multiple mobile nodes. Because the full-duplex MLC network has not been considered, we discuss it in this paper.
TCP, which enables bidirectional transmission over a single connection, is the preferred protocol for large-scale, high-reliability networks. However, establishing TCP connections in MLC presents significant challenges, particularly for highly symmetrical links and mobility-induced delays. To address these challenges, we propose a full-duplex MLC link, where visual tracking integrated with a gimbal stabilizer enables tracking and pointing vehicles and drones during motion. Then, we allow mobile nodes to participate in an all-light communication network with white and blue lights for diverse environments. The network demonstrates full-duplex real-time video communication between mobile and fixed nodes, which is accessible by wired and wireless users. An experimental analysis of the proposed MLC approach is presented in this paper, demonstrating a feasible solution for real-time transmission via mobile equipment in TCP-based wireless light communication networks.
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
2. System Description and Demonstration
For LED-based mobile communications, there exists a basic restriction wherein the utilized communication system must maintain the LOS between the transmitter (Tx) and the receiver (Rx)[23]. Particularly in TCP-based MLCs, the Tx and Rx windows of a system need to be oriented in the same direction and remain continuously aligned with the windows of the opposite system as they move. As shown in Fig. 2, we propose a full-duplex MLC link for drone and vehicle connections. This MLC link comprises symmetrical ends, each of which consists of three main components: a light communication module, an automatic tracking module, and peripheral modules such as drones, vehicles, and power management modules.
Figure 2.A full-duplex MLC link is formed by symmetrical ends, each of which consists of a light communication module, an automatic tracking module, and peripheral modules such as drones, vehicles, and power management modules.
In the light communication module, sources based on the registered jack (RJ)-45 interface are converted into signals through an Ethernet transceiver and fed into a field-programmable gate array (FPGA) for modulation and coding. The FPGA, which employs non-return-to-zero on–off keying modulation, drives the metal–oxide–semiconductor field-effect transistor (MOSFET) to modulate the LED. Figure S1 in the Supplementary Information shows the photoelectric characteristics and 3 dB bandwidth of the white LED. The resulting signal on the LED has an average voltage of 6.4 V with a 3 V peak-to-peak voltage. This MOSFET-based method enhances the modulation depth to compensate for the limited LED bandwidth, achieving a transmission rate of 2 Mbps. On the opposite side, a Hamamatsu S8664-50k avalanche photodiode (APD) at voltages above 360 V is used to convert the light signals into electrical signals. The signals are amplified, filtered, and converted from analog to digital by the Rx circuit and then captured by the FPGA for decoding and demodulation. Finally, the Ethernet transceiver feeds the signals into a Wi-Fi module, which supports wireless relay access to other light communication links or networks. The same is true for the symmetrical link; thus, full-duplex transparent transmission can be achieved.
In the automatic tracking module, visual tracking is integrated with a gimbal stabilizer to automatically track and point the moving target to establish a full-duplex MLC. The visual tracking system comprises a camera, an image transmission module (ITM), and a terminal. The camera captures images at 30 frames per second (fps), which are synchronized with the terminal by the ITM. Within the terminal interface, any object can be marked as the tracking target using a bounding box. The ITM then extracts target features from the initial frame and employs cyclic shifting via the kernel correlation filter algorithm to analyze the target position and predict the motion trajectory. This involves performing a response operation between a continuously updated filter classifier template and the search area of subsequent frames. Target location data are then relayed to the gimbal stabilizer, enabling three-axis rotations via the proportional-integral-derivative control algorithm to point to the moving target.
The modules are designed for portability, enabling easy integration with various lightweight mobile platforms such as drones. A 600 W portable power source provides power to the two modules and the vehicle through alternating current-direct current power adapters. The total weight of a single MLC system excluding the vehicle is 10.4 kg, with the power source accounting for 65% of the weight. Each end of the MLC link is equipped with a power source of 597 W h, allowing for 6 h of continuous operation, where the vehicle accounts for 62% of the power consumption.
To accommodate the MLC at various distances, we design a mechanical zoom mechanism, as shown in Fig. 3(a). By adjusting the distance between the LED and the lens using a threaded mechanism, the system can precisely control the illuminated area. For short-range communication, as shown in Fig. 3(c), dispersed light and a wide-angle camera facilitate faster node motions. Figure 3(d) shows the evenly distributed optical power at a distance of 20 cm, ranging from 0.7 to 1.4 mW. For longer distances () in Fig. 3(e), the system transitions to focused light and a telephoto camera. As depicted in Fig. 3(f), the smaller divergence angle of focused light enables a higher power intensity, peaking at 4.2 mW at the center. Considering the inevitable vibration and swaying of motion, a more evenly distributed light beam enhances the stability of MLC. Figure 3(b) presents a photograph of the paired MLC systems. A TCP-based webcam with a retransmission function acts as the signal source, whereas attitude sensors (ASs) record the vehicle travel direction and the light beam direction.
Figure 3.(a) Exploded view of the light communication module. (b) Physical diagram of paired MLC systems. (c) MLC using dispersed light and a wide-angle camera at a distance of 2 m. (d) Optical power distribution of the dispersed light at a distance of 20 cm. (e) MLC using focused light and a telephoto camera at a maximum distance of 46 m. (f) Optical power distribution of the focused light at a distance of 20 cm.
To enable surface and underwater interconnections, an all-light communication network is developed, as shown in Fig. 4(a). White light connects mobile nodes wirelessly, whereas blue light links fixed nodes. Neighboring light communication links are connected via Wi-Fi, facilitating seamless information sharing within the network at a transmission rate of 2 Mbps. Ethernet switches at network nodes expand the interface capacity, enabling access to two webcams, as shown in Fig. 4(c). The two computers are connected to the network via Wi-Fi and wired connectivity, respectively, demonstrating full-duplex real-time video communication between the mobile and fixed network nodes. Figure 4(b) demonstrates underwater blue light communication (UBLC) with a 12 m transmission distance in a swimming pool (1.7 NTU turbidity) using a neutral density filter of 256[24]. On drone platforms, continuous transceiver alignment compensates for sway and mobility to maintain robust TCP connections, as shown in Fig. 4(d). Moreover, real-time video communications between moving vehicles are demonstrated within a rectangular field measuring under codirectional and opposite motions, as illustrated in Figs. 4(e) and 4(f). Figure 4(g) shows an uninterrupted light communication link between a mobile node and a fixed node during circular motion with a radius of 3 m. In these cases, continuous alignment is maintained between the Tx and Rx regardless of whether the vehicle is moving along a straight or curved path. This ensures a full-duplex MLC link without interruptions, which is crucial for TCP-based services. Visualization 1 demonstrates low-lag videos at 22 fps based on TCP during various motions in diverse environments.
Figure 4.(a) Photograph of the all-light communication network, in which full-duplex real-time video communication is demonstrated between mobile and fixed network nodes (see Visualization 1). (b) UBLC in a swimming pool. (c) Ethernet switches are used at network nodes to expand the interface capacity. (d) Real-time video communication between drones. MLCs are established under (e) codirectional motion, (f) opposite motion, and (g) circular motion, where Δθ denotes the motion angle in a period and f (Δθ) indicates the longer travel distance of the two vehicles.
To facilitate the analysis of the MLC states, we established a three-dimensional Cartesian coordinate system within the experimental field, as shown in Figs. 4(e)–4(g). The vehicle equipped with ASs serves as the observed vehicle. A PM100D optical power meter is fixed near the APD carried by the observed vehicle to record the received optical power. In Figs. 5(a)–5(c), the heading angle () represents the observed vehicle travel direction and the light beam direction. By analyzing the heading angles of the vehicle and the light beam, we can determine whether the light alignment is maintained during motion.
Figure 5.Heading angles of the observed vehicle and the light beam during (a) codirectional motion, (b) opposite motion, and (c) circular motion. Optical power received at different speeds during (d) codirectional motion, (e) opposite motion, and (f) circular motion. Measured PLR, delay, and jitter values of the MLC link at different speeds during (g) codirectional motion, (h) opposite motion, and (i) circular motion. (j) Actual throughput of the MLC link during motion. Inset: BERs of the stationary link at a transmission rate of 2 Mbps. (k) Monitored TCP byte streams from the webcam to the user.
In Fig. 4(e), the two vehicles are remotely controlled to travel along the axis under codirectional motion at a speed () of 1 m/s, where the observed vehicle travels along straight and curved paths. Figure 5(a) clearly shows that the of the light beam remains almost constant at , regardless of whether the vehicle travels in a straight or curved path. This observation confirms that the light beam is consistently directed toward the opposite system, which indicates that light alignment is maintained. As depicted in Fig. 5(d), when the difference between the vehicles is 0 m/s, the received optical power stabilizes around 19.5 µW. However, when the difference increases from 0.5 to 1.5 m/s, the increasing distance between the two nodes leads to a more obvious decrease in the received optical power. The packet loss ratio (PLR), delay, and jitter are essential quantitative metrics for evaluating the performance of TCP-based networks[25]. The maximum transmission unit is set to 1514 bytes for measurement. As shown in Fig. 5(g), the average PLR remains stable below 3.6% and the average delay is below 60 ms across various differences. This stability ensures that the MLC link can effectively support TCP-based services that require stable connections. Under differential speeds and continuous codirectional motion, packet loss increases when the optical power drops below 3 µW, leading to higher retransmission frequencies and, consequently, increased transmission delays.
In Fig. 4(f), the two vehicles travel along the axis in opposite directions at a of 1 m/s, and the observed vehicle follows both straight and curved paths. Figure 5(b) highlights a distinct difference in light beam behavior: remains constant during codirectional motion, whereas it decreases gradually from 0° to in the opposite motion scenario. This shift in occurs as the vehicles transition from an opposite motion to an encounter and subsequent separation from each other. As illustrated in Fig. 5(e), the received optical power initially increases but then decreases at different values, and the peak is observed during the encounter phase. The relative of up to 4 m/s during the encounter phase poses a challenge for automatic tracking. As depicted in Fig. 5(h), the PLR between stationary nodes is measured at 0.9%. As increases to 2 m/s, the PLR subsequently increases and reaches a maximum of 6.8%. Both delay and jitter show a consistent trend, with delay remaining below 64 ms and a maximum jitter of 525 ms. At the moment of encounter, if the optical power exceeds the Rx saturation threshold, the TCP-based MLC link will be interrupted. However, protocols that prioritize speed over reliability, such as the user datagram protocol, may remain functional despite high error rates.
In Fig. 4(g), the observed vehicle travels in a near-circular motion around a fixed vehicle at a of 1 m/s. Figure 5(c) illustrates the consistent 360° circular trajectory of both the vehicle and the light beams, with their headings maintaining a constant 90° offset. This persistent offset confirms that the light beam consistently points toward the center of the circle throughout the circular motion. Imperfect circular motion leads to fluctuations in the received optical power, as depicted in Fig. 5(f). These minor fluctuations are easily optimized by the automatic gain control of the Rx circuit. Figure 5(i) demonstrates that, even at a of 2 m/s, the MLC maintains a PLR below 3.5% and a delay under 48 ms, but a jitter generally exceeding 240 ms. While mobile links exhibit comparable delays to fixed links, their jitter, representing unwanted timing variations, is significantly greater. This can be attributed to increased packet loss and subsequent retransmissions under mobile conditions.
The BER is used to evaluate the physical layer performance of the MLC link, which is measured via an Agilent Technologies 81250 BER analyzer and illustrated in the inset of Fig. 5(j). With a 2 Mbps transmission signal fed into the link for analysis, the BER remains below when the received optical power avoids both the weak and saturation regions. The integration of a Reed–Solomon (RS) encoder within the FPGA significantly enhances the robustness of the TCP connection. This forward error correction (FEC) technique, which provides 8 bytes of error correction for every 239 data bytes, effectively mitigates the impact of bit errors. Specifically, it can reduce the BER below to 0 in actual communication, ensuring reliable data transmission even in challenging mobile conditions. Throughput, which denotes the effective network bandwidth, signifies the maximum capacity of the network for data transmission. Figure 5(j) shows the real-time throughput of the MLC link during TCP video streaming, as the vehicle accelerates from 0.5 to 2 m/s in the opposite direction. Evaluated with 1460-byte video segments, the MLC link achieves a throughput of 1.6 Mbps with 80% channel utilization, limited by transmission overheads. Figure 5(k) illustrates the monitored TCP byte streams from the webcam to the user, demonstrating a stable TCP connection with occasional packet loss and retransmissions. At peak throughput, the byte streams from the Tx remain stable, owing to a first input first output (FIFO) scheme in the FPGA that neither overfills the Rx window nor is limited by congestion. Bridging the Ethernet transceiver and RS encoder, the FIFO module uses backpressure to throttle Ethernet transmission during brief blockages, minimizing packet loss and congestion. The -bit buffer of the FIFO module enables data transmission resumption once the blockage clears, ensuring smooth video streaming. Owing to these effective error and congestion control mechanisms, a minimal presence of retransmission overhead enables a rapid transmission window recovery within tens to hundreds of milliseconds.
To establish reliable TCP-based mobile wireless light communication, the time to traverse a path must exceed the combined duration of the TCP transmission delay, visual tracking delay, and gimbal rotation: where is the time taken for the vehicle to traverse a path, denotes the maximum delay of TCP connection, indicates the maximum delay of visual tracking, and represents the time taken for the gimbal to rotate by the corresponding angle. As shown in Figs. 4(e)–4(g), the motion angle is defined as the change in the of the light beam from the start to the end of the motion and can be represented as . Then, the allowable speed of the mobile nodes can be calculated as where () represents the vehicle travel distance as a function of the motion angle and is the rotation speed of the gimbal stabilizer. This formula highlights that minimizing transmission delay, enhancing image processing efficiency, and increasing gimbal rotation speed can significantly improve the speed of mobile nodes. The rate of heading angle change () is a key metric for characterizing node mobility in MLC. Consequently, longer communication distances correspond to higher achievable node speeds. In this work, we demonstrate a robust TCP connection over MLC with a relative speed of 4 m/s between the moving nodes. Notably, even at a heading angle change rate exceeding 91.6 deg/s, the system maintains a PLR of 6.8% and a delay of 48 ms.
4. Conclusion
We demonstrate an all-light communication network using white and blue lights, enabling real-time video streaming over TCP between mobile nodes (vehicles and drones) under diverse mobility scenarios. The minimum requirement for establishing a mobile wireless light communication link based on TCP is presented: the time to traverse a path must exceed the combined duration of the TCP transmission delay, visual tracking delay, and gimbal rotation. This finding provides a theoretical foundation for future research in this domain.
[19] M. Khan, M. Yuksel. Maintaining a free-space-optical communication link between two autonomous mobiles. IEEE Wireless Communications and Networking Conference (WCNC), 3154(2014).
 AI Video Guide
AI Video Guide  AI One Sentence
AI One Sentence