
Dongyun Lin, Jiaqi Lu, Chunming Li, Xiafu Peng. Distance Measurement Based on Three-Dimensional Surface Reconstruction of Spatial Point Cloud[J]. Laser & Optoelectronics Progress, 2022, 59(14): 1415018
- Laser & Optoelectronics Progress
- Vol. 59, Issue 14, 1415018 (2022)

Fig. 1. Three-dimensional reconstruction system based on binocular vision and line-structured light
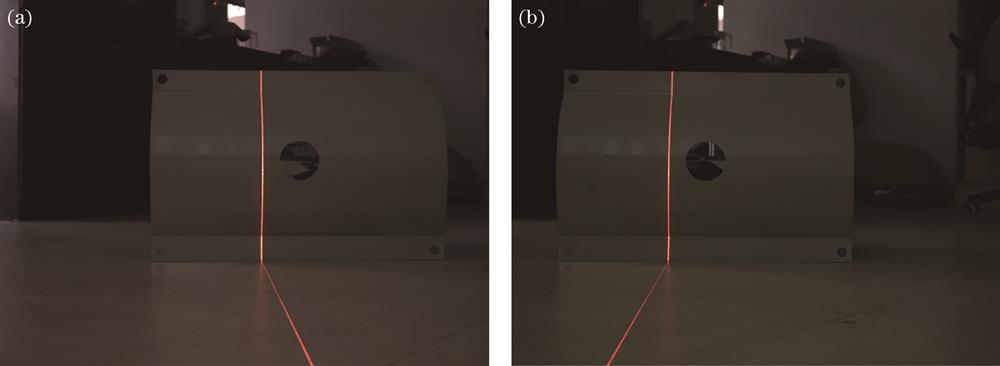
Fig. 2. Images captured by left and right cameras. (a) Image captured by left camera; (b) image captured by right camera
Fig. 3. Line-structured light stripe extraction results. (a) Left camera extraction result; (b) right camera extraction result
Fig. 4. Flow chart of point cloud acquisition
Fig. 5. Difference between point cloud path of curved area and actual surface
Fig. 6. Overall flow chart of geodesic algorithm
Fig. 7. Differences in point cloud path search results between flat and curved areas
Fig. 8. Geodesic point cloud path search results. (a) Experiment 1; (b) experiment 2; (c) experiment 3; (d) experiment 4; (e) experiment 5; (f) experiment 6; (g) experiment 7; (h) experiment 8
Fig. 9. Geodesic point cloud path search results. (a) Experiment 1; (b) experiment 2; (c) experiment 3; (d) experiment 4; (e) experiment 5; (f) experiment 6; (g) experiment 7; (h) experiment 8
Fig. 10. Surface reconstruction results. (a) Greedy projection triangulation result; (b) poisson reconstruction result
|
Table 1. Statistical table of distance measurement results of edge paths and geodesic point cloud paths in flat areas
|
Table 2. Statistical table of geodesic point cloud path measurement results


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20