 AI Video Guide
AI Video Guide  AI Picture Guide
AI Picture Guide AI One Sentence
AI One Sentence

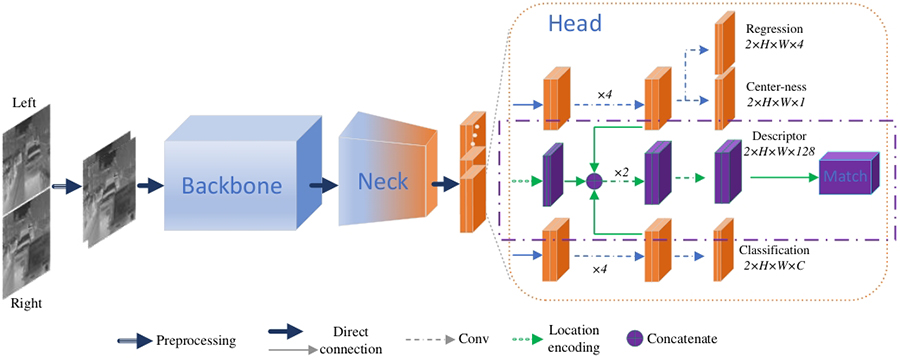
Chang-Wen ZENG, Zhi-Yu YANG, Zuo-Xiao DAI, Ming-Jian GU. Synchronous object detection and matching network based on infrared binocular vision[J]. Journal of Infrared and Millimeter Waves, 2025, 44(1): 111
- Journal of Infrared and Millimeter Waves
- Vol. 44, Issue 1, 111 (2025)
Note: This section is automatically generated by AI . The website and platform operators shall not be liable for any commercial or legal consequences arising from your use of AI generated content on this website. Please be aware of this.
Abstract


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20