
Yong Li, Guofeng Tong, Jingchao Yang, Liqiang Zhang, Hao Peng, Huashuai Gao. 3D Point Cloud Scene Data Acquisition and Its Key Technologies for Scene Understanding[J]. Laser & Optoelectronics Progress, 2019, 56(4): 040002
- Laser & Optoelectronics Progress
- Vol. 56, Issue 4, 040002 (2019)
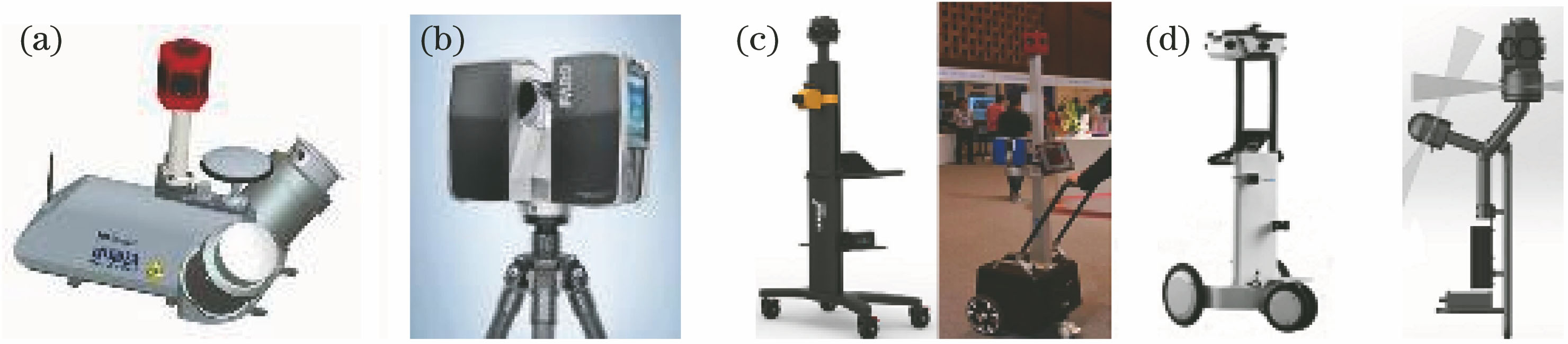
Fig. 1. Three-dimensional data acquisition systems. (a) Vehicle system; (b) fixed scanner; (c) trolley type acquisition system; (d) backpack type acquisition system
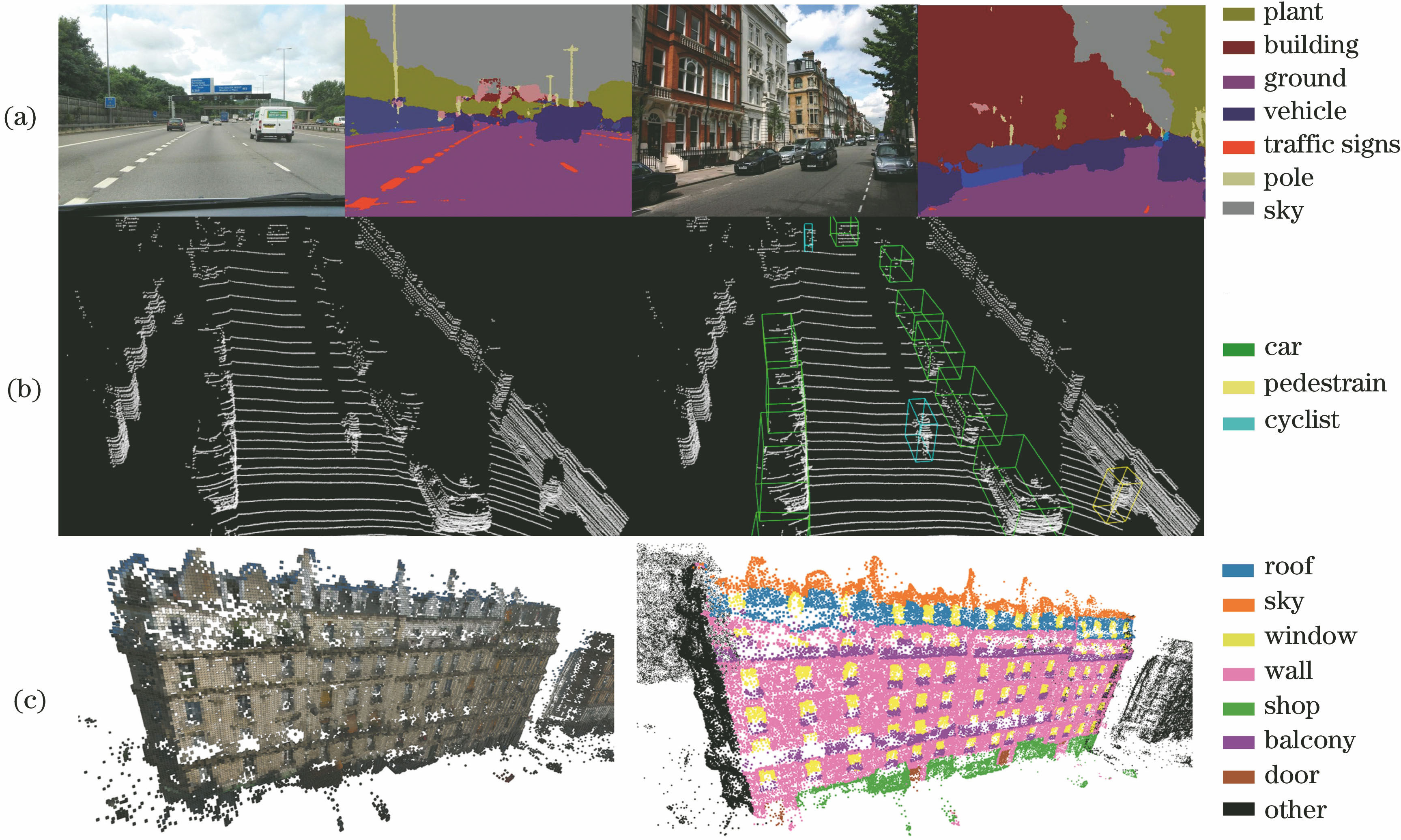
Fig. 2. Examples of scene understanding. (a) Semantic segmentation of image; (b) target detection of point cloud; (c) semantic segmentation of point cloud
Fig. 3. Examples of 2D images affected by environmental factors. (a) Severe occlusion of target; (b) semantic segmentation of (a); (c) target affected by light; (d) semantic segmentation of (c)
Fig. 4. Semantic segmentation of semantic 3D color point cloud of outdoor scene
Fig. 5. Color point cloud image of community
Fig. 6. Trajectory (yellow lines) of collision-based panorama image
Fig. 7. Complete colorful point cloud of outdoor scene
Fig. 8. Research status of point cloud feature extraction and point cloud segmentation
|
Table 1. Comparison of advantages and disadvantages of different data in scenario
|
Table 2. Comparison of noise filtering methods
|
Table 3. Comparison of ground filter methods
|
Table 4. Common methods and comparison of point cloud feature descriptions


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20