
Haolin Liang, Huaiyu Cai, Bochong Liu, Yi Wang, Xiaodong Chen. Road Falling Objects Detection Algorithm Based on Image and Point Cloud Fusion[J]. Laser & Optoelectronics Progress, 2023, 60(10): 1010001
- Laser & Optoelectronics Progress
- Vol. 60, Issue 10, 1010001 (2023)

Fig. 1. Flow chart of algorithm for detecting falling objects
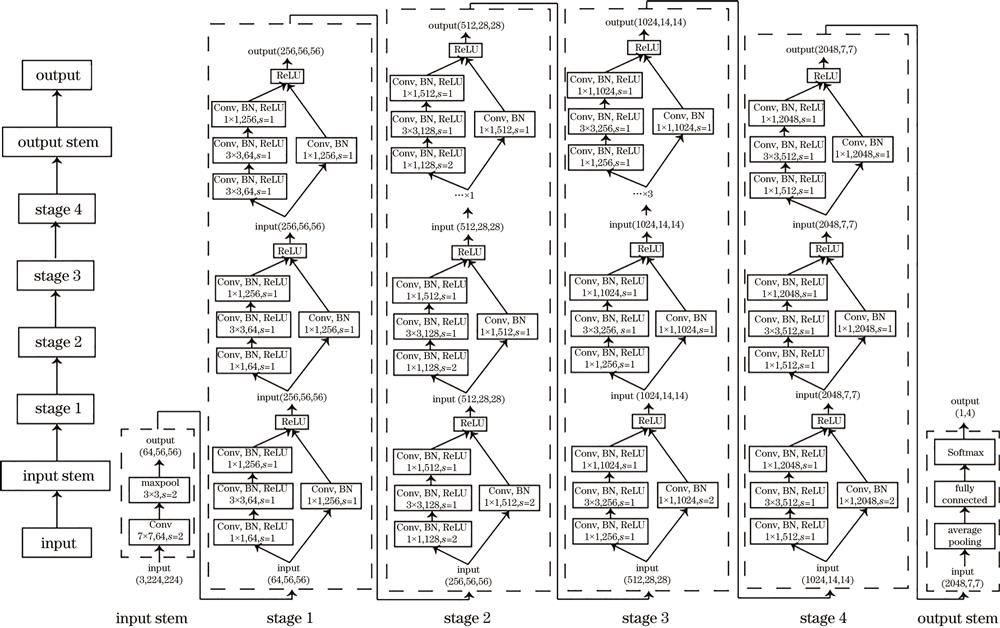
Fig. 2. Structure diagram of ResNet-50
Fig. 3. ResNet-50 down-sampling module optimization. (a) Before optimization; (b) after optimization
Fig. 4. Schematic diagram of test vehicle and sensor installation
Fig. 5. Examples of experimental data collection
Fig. 6. Extraction results of road objects. (a) Road edge extraction; (b) ground point cloud filtering; (c) ground point elimination; (d) point cloud clustering
Fig. 7. Mapping result of point cloud region of interest in visual image
Fig. 8. Detection result of scattered objects in a picture
Fig. 9. Prediction result of scattered object image block
|
Table 1. Main equipment parameters used by the system
|
Table 2. Experimental results of scattered objects detection algorithm
|
Table 3. Detection of falling objects of different sizes
|
Table 4. Comparison of prediction results before and after network structure optimization


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20