
Chenxin JIA, Rongfu ZHANG, Mengyuan REN, Zhaohui XU, Yangdan GONGJI, Hanlin LIU. An endoscope welding spot detection system based on FPGA image processing[J]. Optical Instruments, 2022, 44(5): 53
- Optical Instruments
- Vol. 44, Issue 5, 53 (2022)

Fig. 1. Overall block diagram of the system
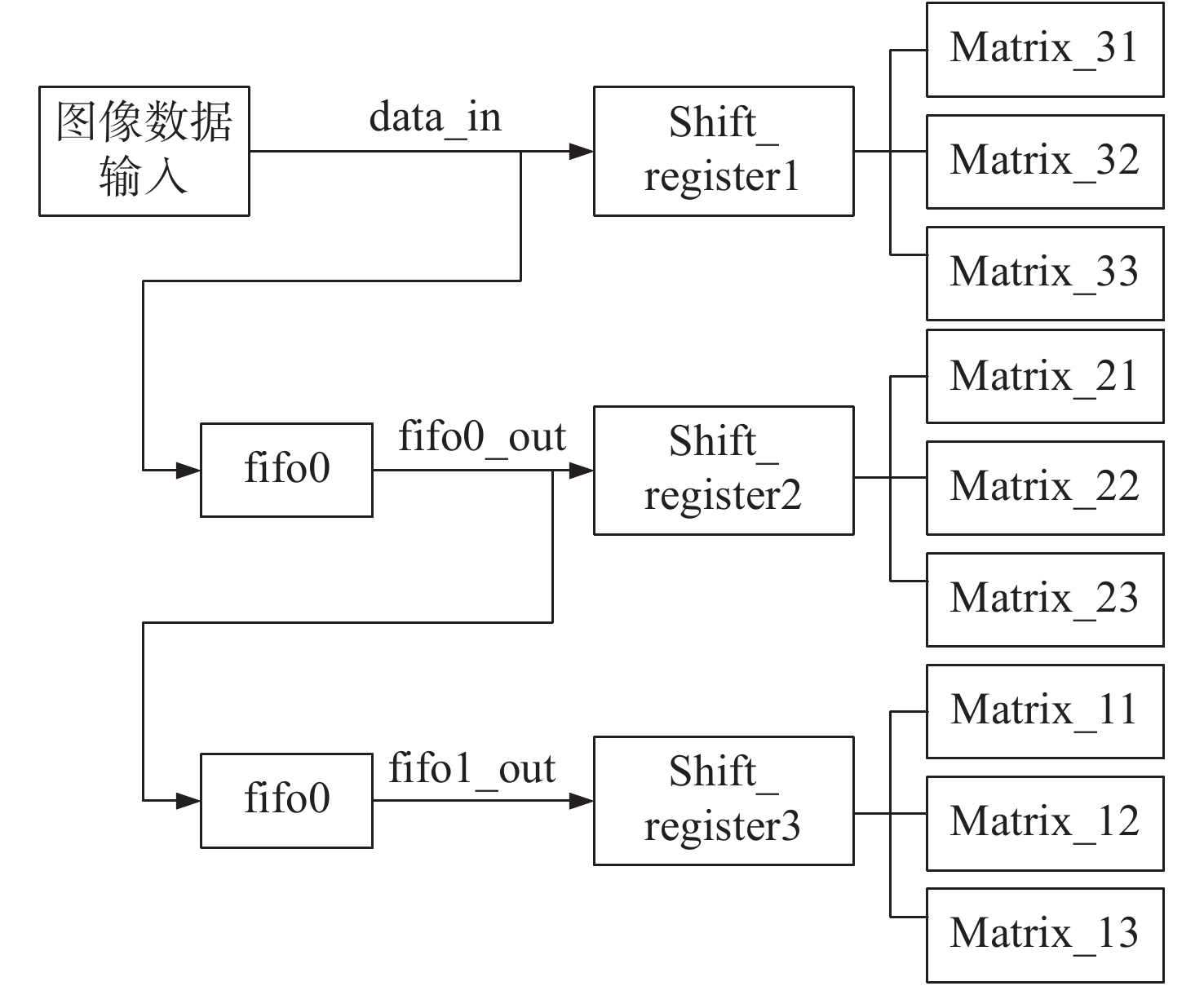
Fig. 2. 3×3 slide window to generate graph
Fig. 3. Effect of image acquisition
Fig. 4. Structure of pixel coordinate system
Fig. 5. Random placement of the target board
Fig. 6. Flow chart of welding point coordinate acquisition
Fig. 7. Linear region segmentation model
Fig. 8. Test platform
Fig. 9. Extraction of coordinates of solder joint
Fig. 10. Defect of target plate
|
Table 1. Comparision between the detected coordinates and the actual coordinates
|
Table 2. Analysis of experimental results of welding spot detection


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20