
Lu Xiong, Zhenwen Deng, Wei Tian, Zhiang Wang. Three-Dimensional Pedestrian Detection by Fusing Image Semantics and Point Cloud Spatial Visibility Features[J]. Laser & Optoelectronics Progress, 2023, 60(2): 0228011
- Laser & Optoelectronics Progress
- Vol. 60, Issue 2, 0228011 (2023)
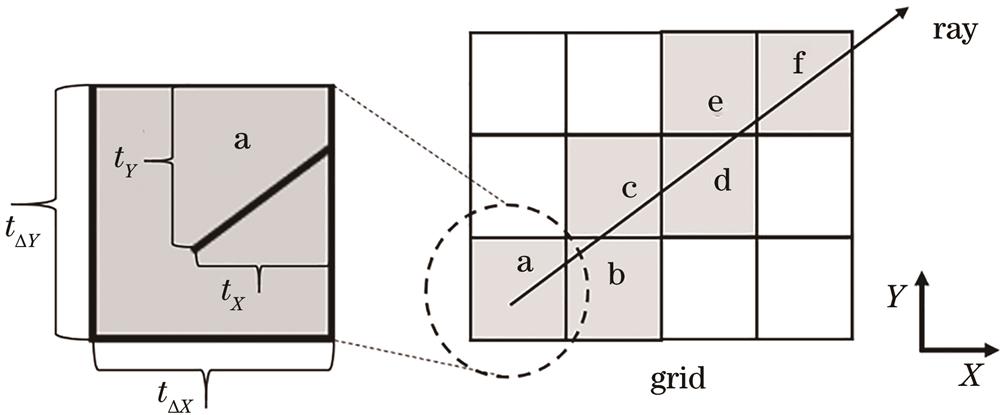
Fig. 1. Schematic of ray traversing grid
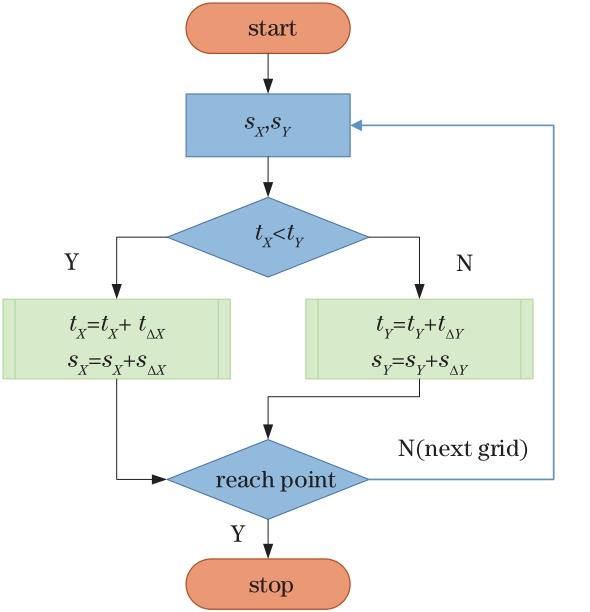
Fig. 2. Logic diagram of 2D Raycasting algorithm
Fig. 3. Overall framework of fusion network
Fig. 4. Semantic segmentation and point feature enhancement
Fig. 5. Geometric feature and semantic feature encoding
Fig. 6. Spatial visibility feature encoding
Fig. 7. Feature fusion and detection heads
Fig. 8. Visibility feature visualization. (a) BEV of point cloud; (b) single layer feature
Fig. 9. Comparison results of pedestrian detection (example 1). (a) (c) Benchmark results; (b) (d) results obtained by proposed method
Fig. 10. Comparison results of pedestrian detection (example 2). (a) (c) Benchmark results; (b) (d) results obtained by proposed method
| ||||||||||||||||||
Table 1. Performance comparison of different visibility description methods on KITTI dataset
| ||||||||||||||||||||||
Table 2. Performance comparison of different density along height direction on nuScenes dataset
| ||||||||||||||||||||||
Table 3. Performance comparison of different number of frames on nuScenes dataset
| ||||||||||||||||||||||||||||
Table 4. Performance comparison of different optimized methods on KITTI validation set
| |||||||||||||||||||||||||||||||||||||||||||
Table 5. Performance comparison of different methods on KITTI test set


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20