
Fengyuan Shi, Chunming Zhang, Lihui Jiang, Qi Zhou, Di Pan. Optimization and Verification of Iterative Closest Point Algorithm Using Principal Component Analysis[J]. Laser & Optoelectronics Progress, 2022, 59(22): 2211001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 22, 2211001 (2022)
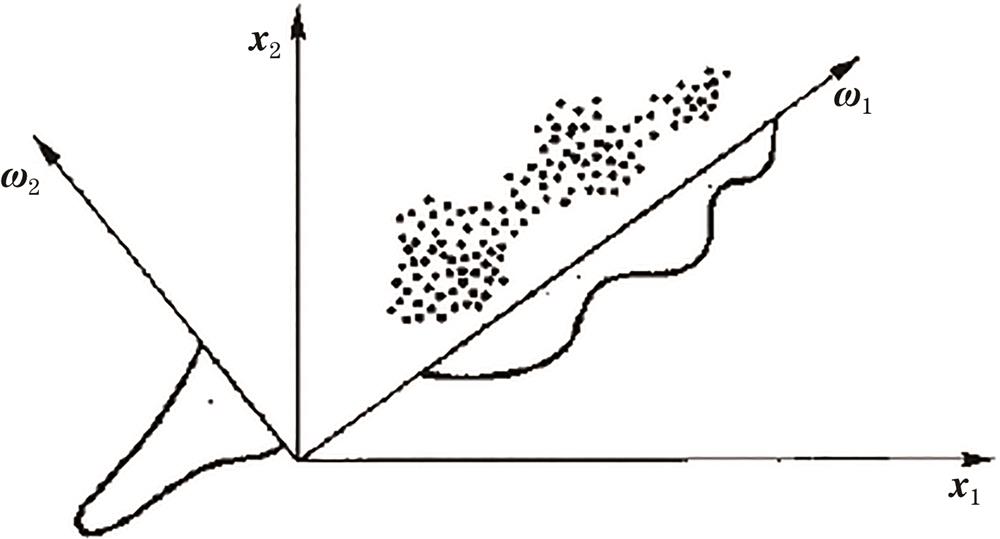
Fig. 1. Schematic diagram of principal component analysis (PCA) in case of two-dimensional input
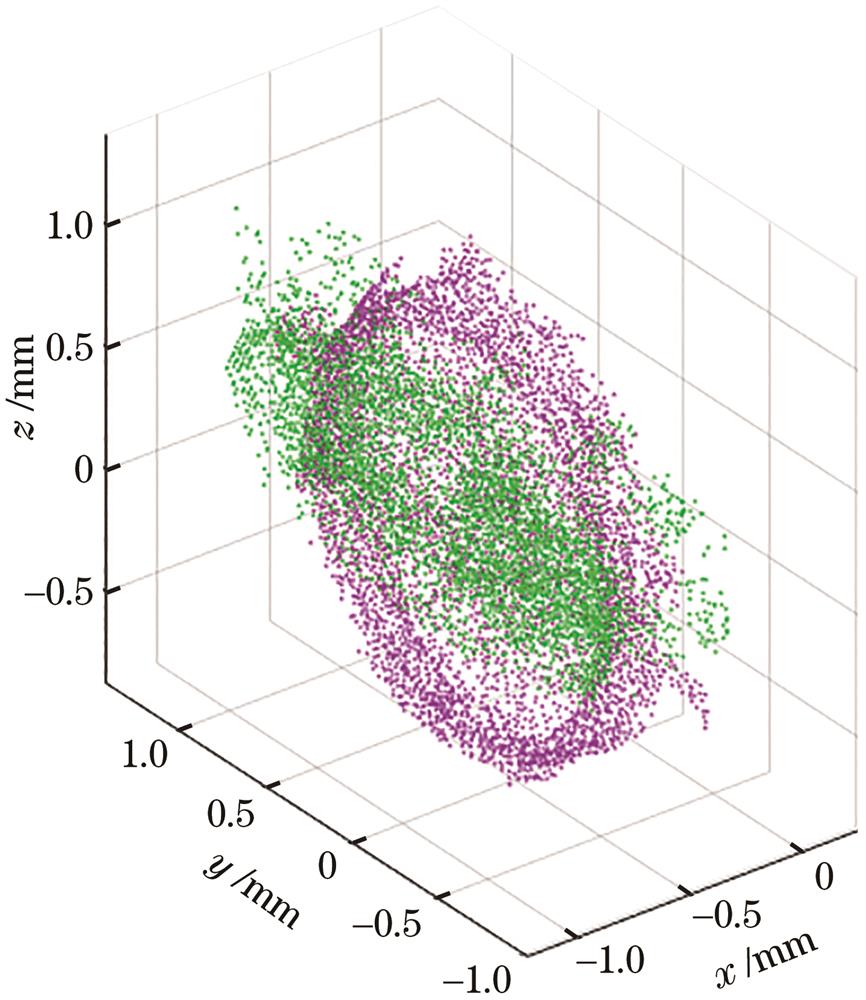
Fig. 2. Simulation result graph of ICP algorithm
Fig. 3. Flow chart of PCA improved algorithm
Fig. 4. Initial posture of point cloud. (a) Query point cloud; (b) reference point cloud; (c) relative position relationship between reference point cloud (lower left quarter) and query point cloud (upper right corner)
Fig. 5. Simulation result graph of ICP algorithm. (a) Iteration error; (b) registration error; (c) registration result
Fig. 6. Decentralized point cloud image. (a) Rough initial value; (b) accurate initial value
Fig. 7. Rough initial pose registration result map. (a) Iteration error; (b) registration error; (c) registration result
Fig. 8. Accurate initial pose registration result map. (a) Iteration error; (b) registration error; (c) registration result
Fig. 9. Top three principal components of point cloud. (a) Reference point cloud; (b) query point cloud
Fig. 10. PCA preprocessing registration results. (a) Iteration error; (b) registration error; (c) registration result
Fig. 11. PCA iterative registration results. (a) Iteration error; (b) registration error; (c) registration result
Fig. 12. PCA iteration+rough initial value registration result. (a) Iteration error; (b) registration error; (c) registration result
Fig. 13. PCA iteration+accurate initial value registration result. (a) Iteration error; (b) registration error; (c) registration result
|
Table 1. Calculation process of ICP algorithm
|
Table 2. PCA iterative simulation results


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20