
Meng Xia, Hongzhi Du, Jiarui Lin, Yanbiao Sun, Jigui Zhu. Object Pose Estimation Method Based on Keypoint Distance Network[J]. Laser & Optoelectronics Progress, 2023, 60(16): 1615008
- Laser & Optoelectronics Progress
- Vol. 60, Issue 16, 1615008 (2023)
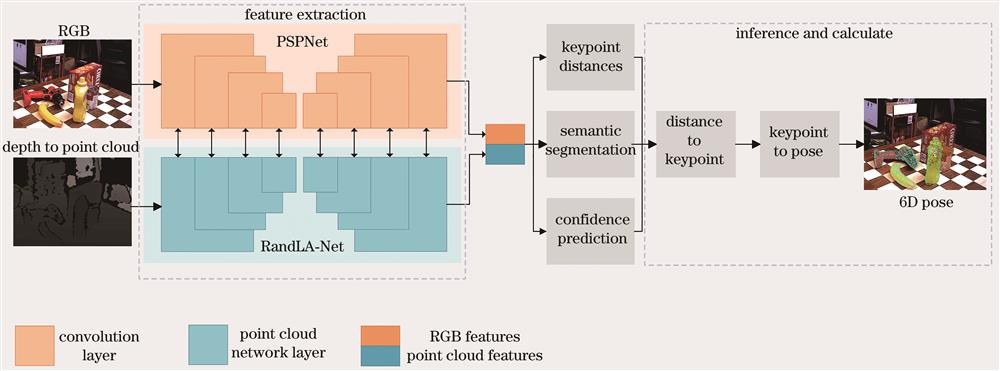
Fig. 1. Overview of pose estimation
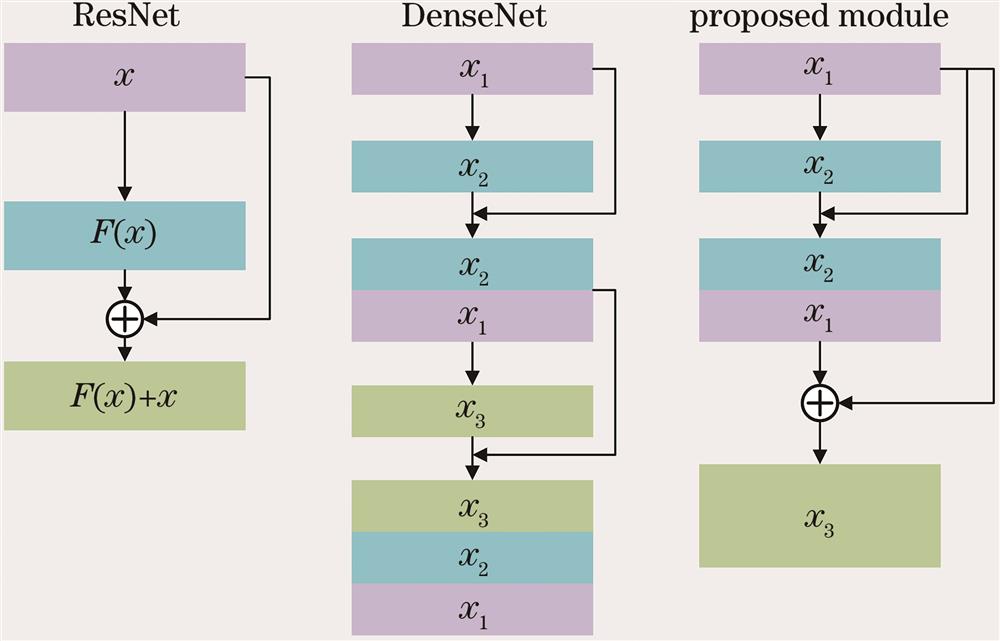
Fig. 2. Backbone network module
Fig. 3. Feature fusion structure
Fig. 4. Confidence network
Fig. 5. Flow chart of reasoning calculation
Fig. 6. Visualization results. (a) LineMOD dataset; (b) YCB-Video dataset
Fig. 7. Comparison of pose estimation results
|
Table 1. Test results on LineMOD dataset [10%d-ADD(S)]
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Test results on YCB-Video dataset [AUC-ADD(S)]
|
Table 3. Accuracy comparison of different backbone network modules
|
Table 4. Feature network parameters of different backbone network modules
|
Table 5. Comparison of results with or without data processing


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20