
Jianpeng SU, Yingping HUANG, Bogan ZHAO, Xing HU. Research on visual odometry using deep convolution neural network[J]. Optical Instruments, 2020, 42(4): 33
- Optical Instruments
- Vol. 42, Issue 4, 33 (2020)
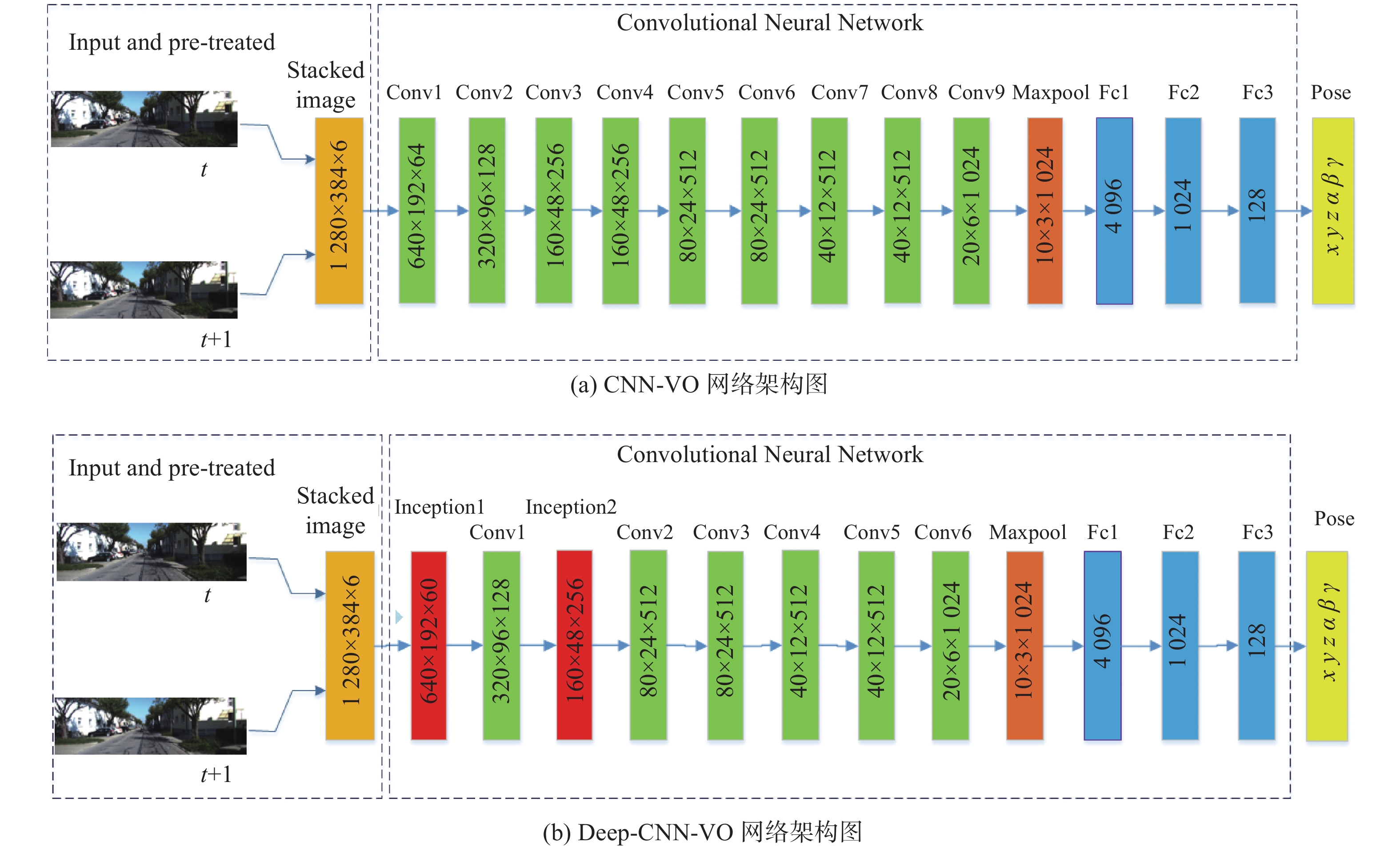
Fig. 1. Flow diagram of visual odometry end-to-end network

Fig. 2. Inception structure
Fig. 3. The trajectory estimation of 04,05,07 and 10 sequence
|
Table 1.
CNN-VO subconvolution parameter
CNN-VO子卷积参数
|
Table 2.
Deep-CNN-VO subconvolution parameter
Deep-CNN-VO子卷积参数
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3.
The comparison experimental results of 03, 04, 05, 07 and 10 test sequence
测试序列03、04、05、07、10实验结果对比


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20