
Shilong Xu, Yuhao Xia, Jiajie Dong, Qishu Qian. Lidar point cloud expansion and identification method for masking targets based on time-spectra information[J]. Infrared and Laser Engineering, 2023, 52(6): 20230213
- Infrared and Laser Engineering
- Vol. 52, Issue 6, 20230213 (2023)
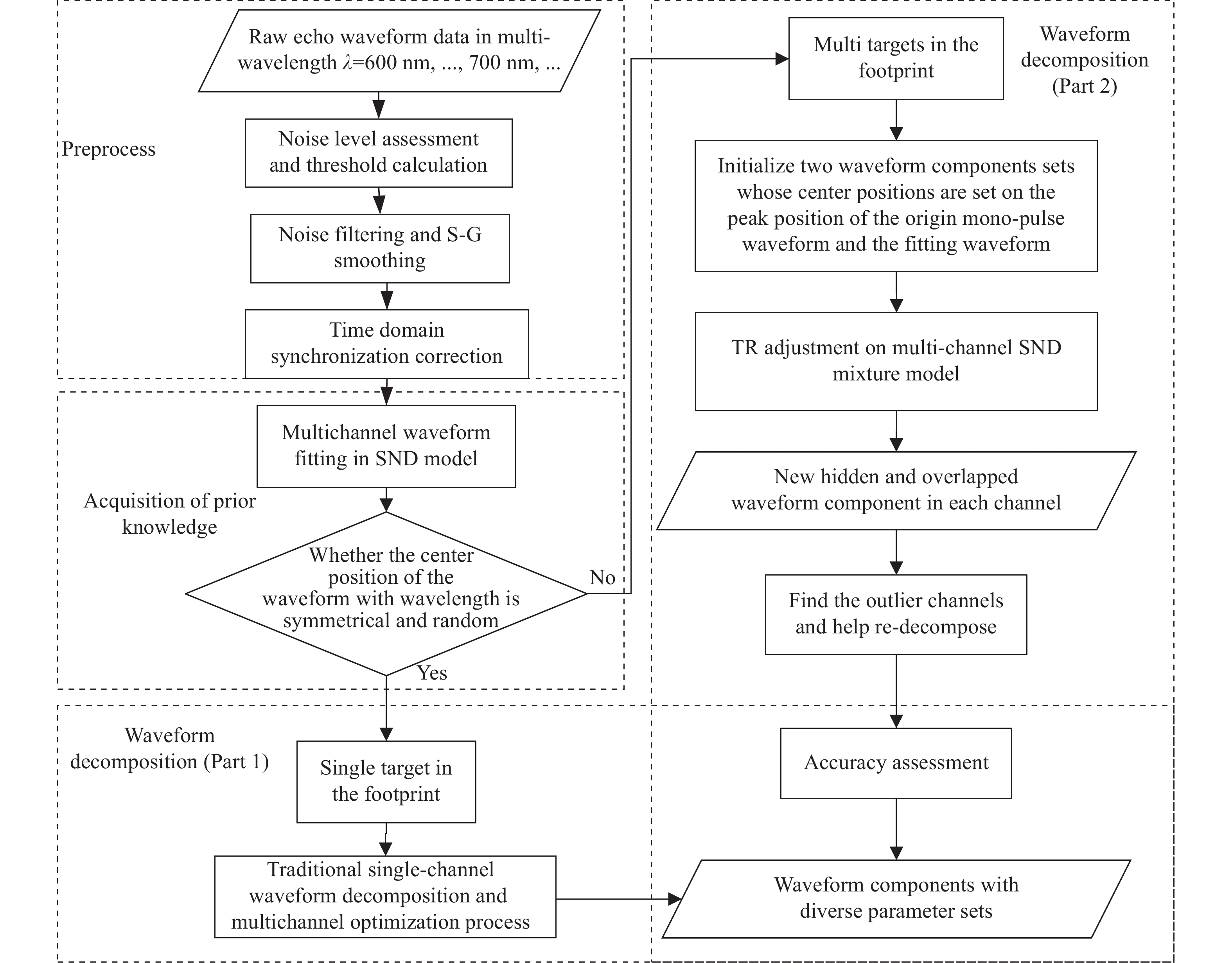
Fig. 1. Flowchart of the proposed hyperspectral waveform decomposition method

Fig. 2. Schematic diagram of point cloud expansion and identification method
Fig. 3. Schematic diagram of the experimental scene
Fig. 4. Decomposition results of classical waveform decomposition method for echoes of four wavelength channels
Fig. 5. Waveform decomposition results from four wavelength channels using hyperspectral waveform decomposition method
Fig. 6. Reconstructed targets' spectral reflectance results. (a) Classical waveform decomposition method; (b) Hyperspectral waveform decomposition method
Fig. 7. Comparison of the laser point cloud and expansion results. (a) Original point cloud; (b) After expansion; (c) Before indentification; (d) After indentification


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20