
Run Wang, Zhouping Su. MEMS-Based Panoramic LiDAR System with Separated Transmitting and Receiving Modules[J]. Acta Optica Sinica, 2024, 44(18): 1822003
- Acta Optica Sinica
- Vol. 44, Issue 18, 1822003 (2024)
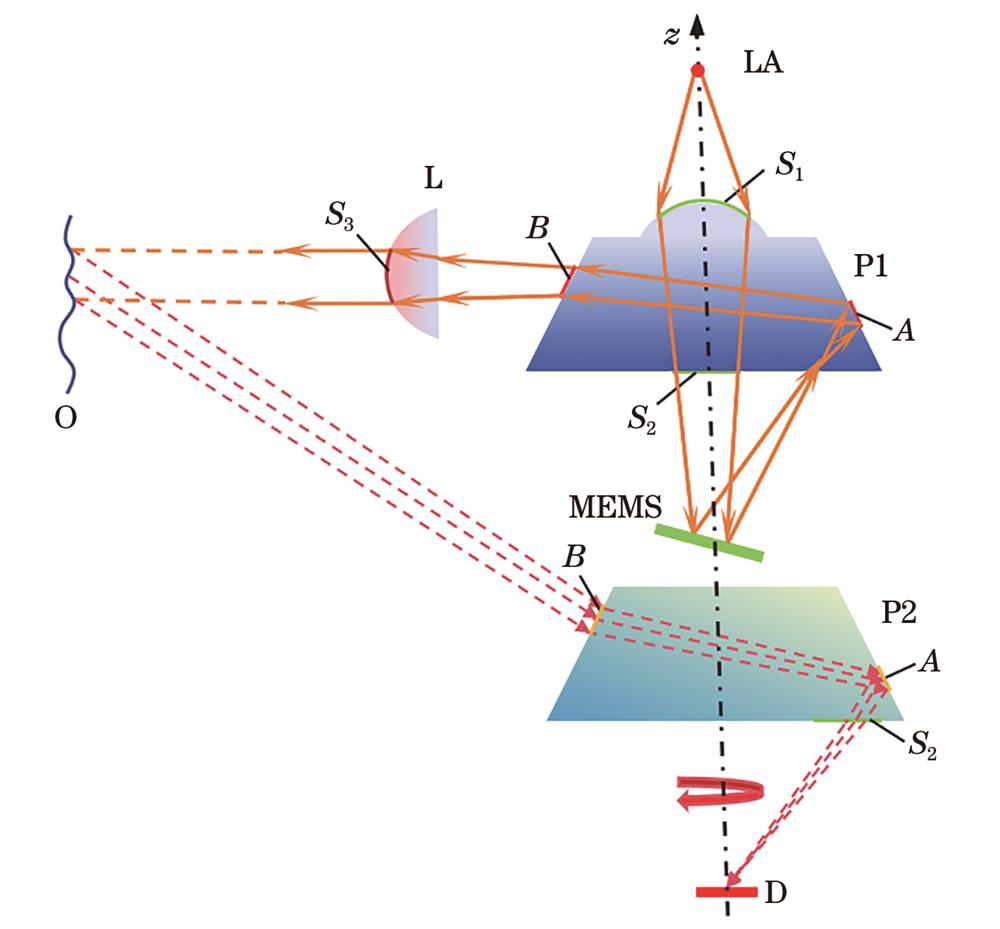
Fig. 1. Conceptual diagram of MEMS LiDAR profile with separated transmitting and receiving

Fig. 2. Structure diagrams of scanning optical module. (a) yoz plane structure; (b) xoy plane structure
Fig. 3. Structure diagrams of multi-field scanning module. (a) yoz plane multi-field structure; (b) xoy plane multi-field structure
Fig. 4. Profile diagrams of multi-field luminous intensity distribution. (a) Divergence angle of each vertical field of view; (b) divergence angle of each horizontal field of view
Fig. 5. Structure diagram of yoz plane multi-field simulation
Fig. 6. Irradiance distribution diagrams. (a) Irradiance distribution diagrams of the target surface at different locations; (b) irradiance distribution diagram at 200 m
Fig. 7. Comparison diagrams of the model divergence angle before and after adding annular lens to the scanning optical module structure. (a) Before adding annular lens; (b) after adding annular lens
Fig. 8. Structure diagrams of receiving optical module. (a) yoz plane structure diagram; (b) xoz plane structure diagram
Fig. 9. Received spot diagram
|
Table 1. Lens parameters for panoramic scanning MEMS LiDAR system
|
Table 2. Parameters of LiDAR system with separated transmitting and receiving


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20