
Kun Zhang, Yawei Zhu, Xiaohong Wang, Liting Zhang, Ruofei Zhong. Three-Dimensional Point Cloud Semantic Segmentation Network Based on Spatial Graph Convolution Network[J]. Laser & Optoelectronics Progress, 2023, 60(2): 0228007
- Laser & Optoelectronics Progress
- Vol. 60, Issue 2, 0228007 (2023)

Fig. 1. PCGCN problem description diagram
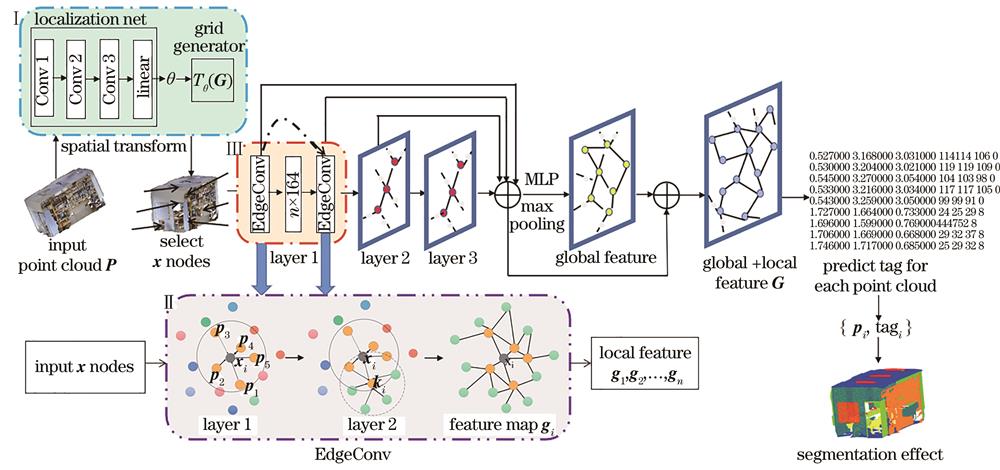
Fig. 2. Overall structure diagram of PCGCN
Fig. 3. EdgeConv subnet. (a) 2nd layerneighborhood aggregation; (b) 1st layer neighborhood aggregation; (c) local features graph
Fig. 4. PCGCN residual network diagram
Fig. 5. Aggregating characteristics of different layers
Fig. 6. KNN diagrams. (a) Original KNN; (b) randomly delete nodes; (c) original sampling result; (d) sampling result after improvement
Fig. 7. Comparison of training results of S3DIS.(a) Train average accuracy; (b) train accuracy; (c) train IoU
Fig. 8. Visualization of segmentation results in S3DIS
Fig. 9. Accuracy of ShapeNet test set
Fig. 10. Visualization of segmentation results in ShapeNet
Fig. 11. Robustness analysis on ShapeNet
Fig. 12. Anti noise analysis on S3DIS
|
Table 1. Parameter comparison experiment
|
Table 2. Semantic segmentation results of S3DIS
|
Table 3. Semantic Segmentation time of S3DIS
|
Table 4. Parameter sensitivity experiment
|
Table 5. Semantic segmentation results of ShapeNet


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20