
Jianguo Liang, Maolin Chen, Hong Ma. Registration of Terrestrial Laser Scanning Data Based on Projection Distribution Entropy[J]. Laser & Optoelectronics Progress, 2019, 56(13): 131501
- Laser & Optoelectronics Progress
- Vol. 56, Issue 13, 131501 (2019)
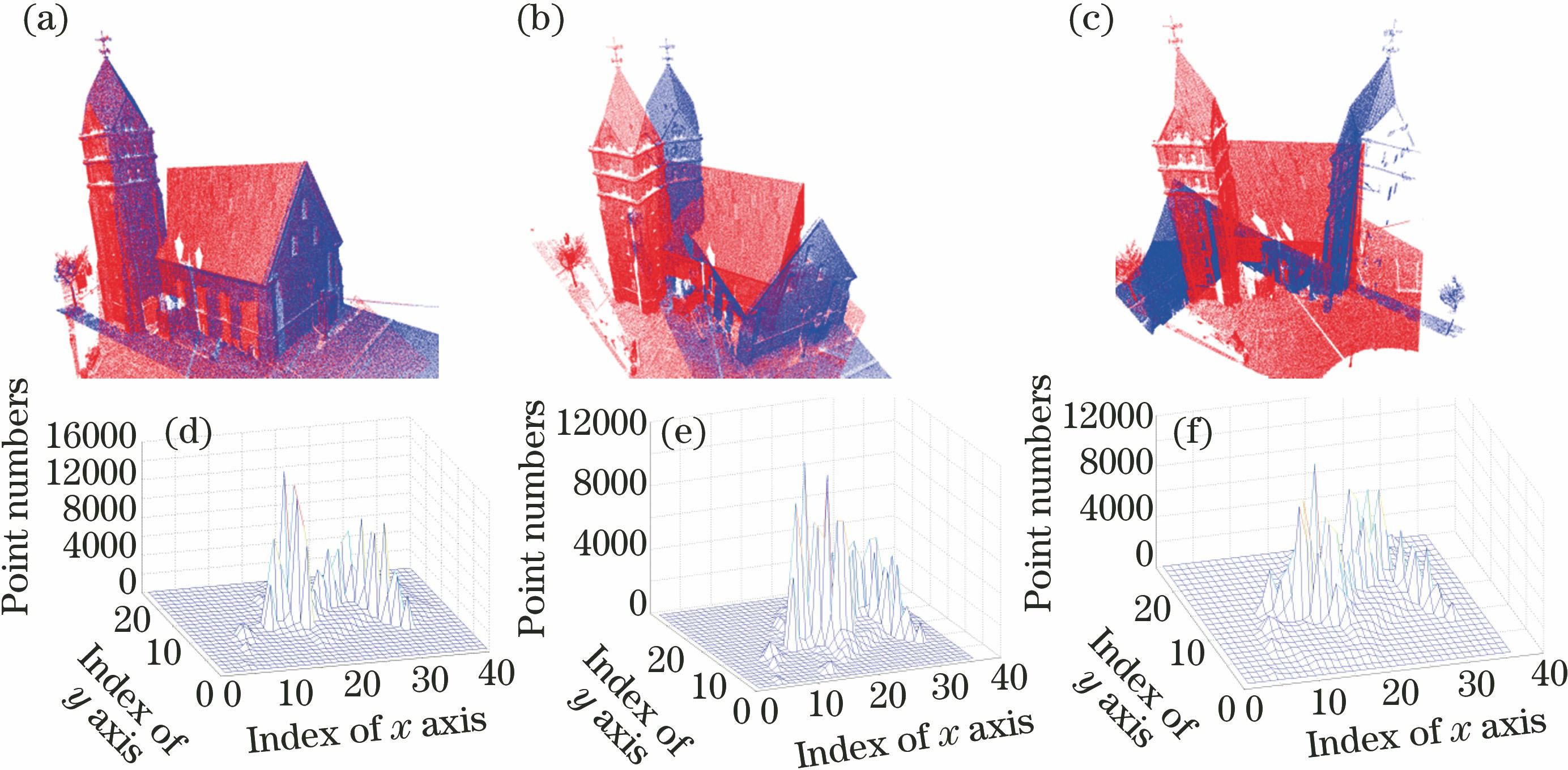
Fig. 1. Point cloud distributions corresponding to different rotation parameters. (a) Correct registration;(b) incorrect registration 1; (c) incorrect registration 2; (d) point cloud distribution of correct registration; (e) point cloud distribution of incorrect registration 1; (f) point cloud distribution of incorrect registration 2
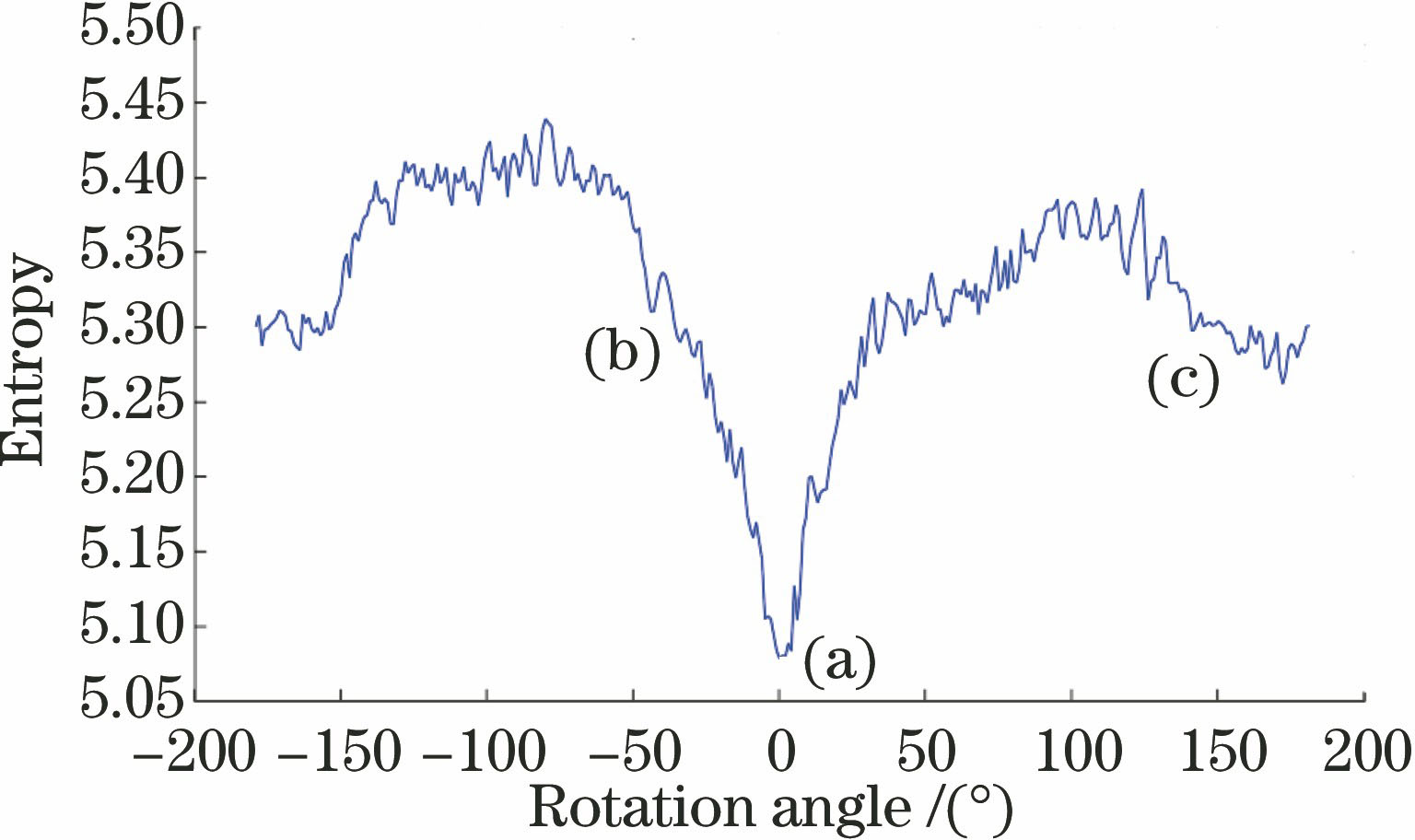
Fig. 2. Relationship between entropy change and rotation angle around z axis. 0° corresponds to space distribution of correct registration
Fig. 3. Three groups of point clouds before and after registration. (a) Dataset 1 before registration; (b) dataset 2 before registration; (c) dataset 3 before registration; (d) dataset 1 after registration; (e) dataset 2 after registration; (f) dataset 3 after registration
Fig. 4. Registration errors caused by view change and structural similarity and symmetry. (a) Incorrect registration caused by view change and structural symmetry; (b) incorrect registration caused by structural similarity; (c) incorrect translation caused by structural similarity; (d) rotation error caused by structural symmetry
Fig. 5. Registration error and time in terms of different tG. (a)(b) S2-S3 of dataset 1; (c)(d) S2-S3 of dataset 2; (e)(f) S1-S2 of dataset 3
Fig. 6. Density change experiments corresponding to different sampling ratios
|
Table 1. Basic information of datasets
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Distances between adjacent station positions and registration order
| ||||||||||||||||||||||||||||||||||||||||||||
Table 3. Registration error
|
Table 4. Registration results of dataset 1
|
Table 5. Registration results of dataset 2
|
Table 6. Registration results of dataset 3
|
Table 7. Registration mean root errors corresponding to different tilted angles


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20