【AIGC One Sentence Reading】:Floquet engineering utilizes space-time modulation to transform wave systems, enabling disorder removal, Anderson localization control, and enhanced localization in waveguides.
【AIGC Short Abstract】:Floquet engineering is extended to utilize spatial degrees of freedom, enabling the transformation of tight-binding systems through space-time dependent driving forces. Applications include disorder removal, reversal of Anderson localization, and enhancement of localization in modulated waveguides.
Note: This section is automatically generated by AI . The website and platform operators shall not be liable for any commercial or legal consequences arising from your use of AI generated content on this website. Please be aware of this.
Abstract
In Floquet engineering, we apply a time-periodic modulation to change the effective behavior of a wave system. In this work, we generalize Floquet engineering to more fully exploit spatial degrees of freedom, expanding the scope of effective behaviors we can access. We develop a perturbative procedure to engineer space-time dependent driving forces that effectively transform broad classes of tight-binding systems into one another. We demonstrate several applications, including removing disorder, undoing Anderson localization, and enhancing localization to an extreme in spatially modulated waveguides. This procedure straightforwardly extends to other types of physical systems and different Floquet driving field implementations.
1. INTRODUCTION
Driving a system periodically can generate new out-of-equilibrium phases that differ substantially from the original undriven system. Such driven phases are ubiquitous and have been extensively studied in physics, from Kapitza’s pendulum in mechanics [1] to Thouless pumping in quantum physics [2,3]. An important milestone for periodic driving was the discovery of dynamic localization (DL) in atomic physics in 1986 [4]. Naively, one might expect that applying a periodic force to a wave packet would cause it to accelerate or scatter. However, as the name suggests, in DL, one can drive a lattice containing a single electron in a way that suppresses the coupling between lattice sites, making them behave as if fully disconnected. This counterintuitive influence of DL has been observed in manifold experiments and is now understood to be a general wave phenomenon [5–18].
The past two decades have seen a surge of interest in Floquet engineering, which is a considerable extension of DL and encompasses a range of techniques to modify a wave system’s behavior using a periodic driving field. Experimentally, Floquet driving has been realized in manifold systems, from condensed matter [19–24], to cold atoms [25–32], to photonics [33–41]. Notably, the demonstration of Floquet topological insulators in curved waveguide arrays had a progenitive role in topological photonics [42–49]. The beauty of Floquet engineering lies in its simplicity: driving a system periodically gives us new degrees of control, allowing us to generate novel behaviors. At the same time, conventional Floquet engineering is also a rather blunt instrument, with only a few available parameters (driving strength, frequency, and in some cases polarization and polychromatic waves [50–55]), giving us limited leverage to induce a desired behavior in a prefabricated physical platform. So far, spatial degrees of freedom have been exploited in limited, specific contexts [21,56–59].
Here, we open up the full set of spatial degrees of freedom in Floquet engineering, giving us greater control over systems. Specifically, we show that with properly tailored driving fields, we can make a large class of 1D nearest-neighbor tight-binding Hamiltonians behave as any other, to a leading order in perturbation theory. This allows us to carry out applications previously thought impossible, such as undoing Anderson localization [60–70]; i.e., we show a tailored drive can turn a disordered system into an effectively ordered one. We also construct a spatially dependent driving that has the opposite effect, inducing Anderson localization in a regular lattice.
Sign up for Photonics Research TOC. Get the latest issue of Photonics Research delivered right to you!Sign up now
2. SPACE-TIME-DEPENDENT FLOQUET ENGINEERING
Space-time-dependent Floquet engineering is conceptually straightforward. Though our primary physical application in this paper is photonic waveguides, it is illustrative to begin with a more generic example. Consider an arbitrary physical system governed by the time-independent Hamiltonian . We wish to drive with a space- and time-dependent field driving such that the overall system behaves as a desired time-independent Hamiltonian . That is,
The novel ingredient in this paper is that we allow to have not just time dependence but also spatial dependence. We give a time periodicity and frequency . Let us pause to emphasize that this work only explicitly considers monochromatic driving fields, whose spatial degrees of freedom will prove quite powerful. Combining this with further degrees of freedom like multiple frequencies on top of spatial dependencies can expand our reach yet further.
In theory, there may be an infinitely large number of we can choose in Eq. (1) that adequately approximate the behavior . In practice, however, the range of Hamiltonians that we can fabricate and the fields we can create may be significantly limited by experimental capabilities. Our goal is to develop a straightforward recipe for engineering driving fields that approximately produce the desired behavior , subject to such experimental constraints.
Perturbation theory is one method to approximately solve Eq. (1), as the driving field frequency serves as a natural small expansion parameter. We can obtain a time-independent approximation of a driven system’s behavior using a Magnus expansion [71], a tool originally developed in the applied mathematics literature for solving a class of differential equations that naturally includes many time-periodic systems in physics; as such, it is used extensively in Floquet engineering across many physical platforms, e.g., Refs. [72–74]. Dropping spatial arguments for concision, the Magnus expansion takes the form
The left-hand side (LHS) of this equation evaluates to simply , as is time-independent. On the right-hand side (RHS), the th order term consists of commutators nested times. The first term on the RHS is and describes the dispersion that would occur if were averaged out. The second term on the RHS is an correction. (In DL, these two terms are often treated collectively.) The first term on the RHS may depend on and differ from the undriven . While in principle the Magnus expansion has known convergence issues in various scenarios [72,75–77], we will see that, in practice, it can serve as a strong starting point for spatially nonuniform Floquet engineering.
A. Example: Sinusoidal Driving
Let us consider a simple illustrative example, taking the Hamiltonians’ Eq. (1) to have the form of a matrix, and imposing a sinusoidal driving , with also a matrix. Evaluating Eq. (2) over one period of oscillation , we have
Finding an appropriate driving field that makes behave as some new effective Hamiltonian at accuracy thus amounts to solving an inverse commutator problem, where the goal is to calculate in terms of and . Note that while there are many choices of time-dependent driving fields, they typically reduce to an inverse commutator problem resembling Eq. (4). Solving Eq. (4) for is a straightforward algebraic exercise (see Appendix A). {Note that Eq. (4) defines the elements of a Lie algebra. For example, in the case of real matrices, we have the general linear Lie algebra on the real numbers, . Solutions then belong to the Eq. (4) subgroup, the special linear Lie algebra . Properties of Lie algebras are well known, and restrict the form of what in Eq. (4) we can achieve exactly; for example, taking the trace on both sides of Eq. (4), we see that must always be traceless. However, we remind the reader that here we are pursuing approximate solutions, and Eq. (4) is itself an expansion. It is straightforward to consider more general classes of operators as well, such as non-Hermitian systems [78–82].}
3. FLOQUET ENGINEERING OF CURVED WAVE GUIDES
As a concrete implementation of space-time-dependent Floquet engineering, we consider an array of curved paraxial waveguides with low refractive index contrast. In the slowly varying envelope (paraxial) approximation, waves traveling through this system obey a Schrödinger-like equation,
Here, is the Hamiltonian, is the wave function, is the local distribution of the refractive index, and is the wavenumber. The axis of wave propagation is , which plays the same role as time in Section 2. The vector signifies transverse directions. In the paraxial approximation, the array behaves like a tight-binding model. The curvature of the waveguides induces a -dependent driving field .
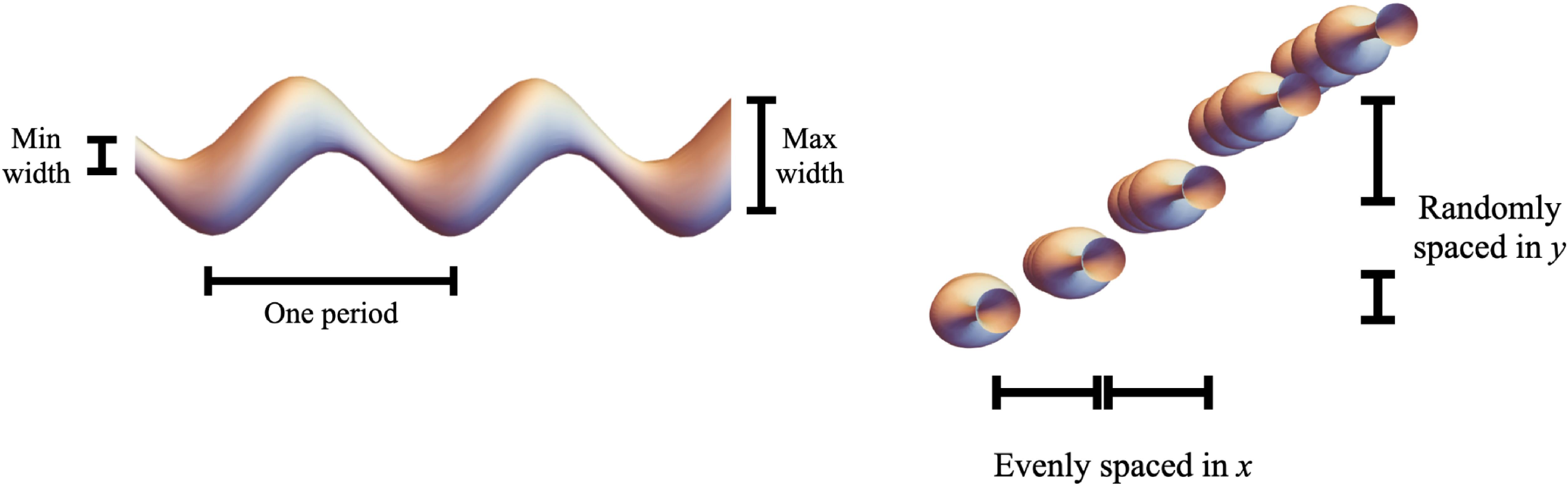
The simplest such system we can analyze occurs when the wave guides have only nearest-neighbor (nn) couplings. Straight (undriven) nn-coupled wave guides are described by a -independent tridiagonal matrix, where has nonzero entries only on the first off-diagonal describing the couplings. In the examples used in this paper, we take randomly chosen couplings, . To induce a driving field in this array, we curve the wave guides along zigzagged paths, as sketched in Fig. 1. Concurrently, we undulate the width of each wave guide periodically. The wave guides oscillate in unison, so their distances are -independent. We make the wave guide trajectories locally parabolic, inducing an artificial gauge field on the wave packets and causing the nn couplings to rotate phase as . We vary the on-site potential and modulate the wave guide thickness as , alternating sign after each period. The propagation of light through the driven system is governed by the -dependent Hamiltonian, as explained in greater detail in Appendices B and C.
Figure 1.System schematic, side, and top views. Set of wave guides evenly spaced in the direction but randomly spaced along the axis. Wave guides take periodic trajectories in space and have periodic thickness modulations. Shape is exaggerated for illustration.
Let us find the lowest-order effective Hamiltonian that describes the behavior of Eq. (7). Applying the Magnus expansion in Eqs. (2)–(7) and averaging over one period, we have Recall that the Schrödinger equation carries an extra factor of , which both lies in and propagates throughout the Magnus expansion. The terms and are both diagonal matrices. The other two commutators in Eq. (8) have nonzero elements only on their first off-diagonals.
Let us now curve the wave guides (i.e., by choosing appropriate and ) such that behaves approximately as some -independent system, where is again diagonal and has nonzero entries only on the first off-diagonal. We begin by equating the LHS of Eq. (8) with the LHS of Eq. (9), which simplifies to
On the RHS, the first parenthetical set of terms is purely diagonal, and the second set of terms is purely off-diagonal. It is straightforward to check that the RHS is purely Hermitian. Likewise, on the LHS, is skew-Hermitian. Thus, is Hermitian, i.e., .
We have enough degrees of freedom available that we can take to be tridiagonal. In this case, let us examine the terms of the -commutator in Eq. (10),
This commutator is also tridiagonal. We can examine each diagonal separately, Combining Eq. (12) with Eq. (10), we find that
The latter equation allows us to construct the diagonal terms of recursively, with . Note that using this scheme, we still have additional degrees of freedom we can exploit; namely, we can alter the on-site potential to change the structure of .
The analytically tailored driving field (curvature) removes disorder up to corrections. If we use large driving frequencies , all terms of are small, and thus the dynamics are slow and of small bandwidth. In many cases, it is possible to reduce the effect of corrections without explicitly working at the next order in the expansion of , by numerically optimizing the choice of and .
A. Example Driving Parameters
Here, let us take our desired Hamiltonian to have uniform nearest-neighbor couplings and no on-site potential .
Example 1.
Let us assume . Then our driving field is , and we can identify
Example 2.
We could also choose to work with both an on-site potential and a driving field . In this case, it is possible to eliminate the off-diagonal terms in by fixing properly. Specifically, we can take
B. Reversing Anderson Localization
In Fig. 2(A), we show how waves propagate through a set of straight wave guides, as described by Eq. (6). These waveguides are disordered, so we expect Anderson localization to bring transverse transport in the array to a halt [83]. In Fig. 2(A), we see that a localized beam incident on the array does indeed remain localized.
In Fig. 2(B), we consider propagation through the wave guide when acted upon by a simple, spatially uniform AC driving field. This case corresponds to an that is proportional to the site index, so that the difference between every two sites (the electric field) is constant. Whatever the field amplitude, we do not expect the localizing effect of disorder to be undone, so as an example we take the amplitude for which an equivalent ordered lattice would not undergo localization. As expected, an AC field generally causes a wave packet to diffuse and eventually arrests its propagation (except in extreme cases, like that when the field strength is so large as to completely dominate the Hamiltonian’s behavior and dwarf the disorder).
In Fig. 2(C), we construct one possible curvature of the wave guides (driving field) in Eq. (7) that counteracts the disorder in the wave guides, making the system behave as an effectively uniform, ordered array. To do so, we calculate appropriate choices of and that produce the desired effective Hamiltonian. Specifically, we make a choice of that is purely diagonal, as described in Section 3.A and Fig. 3. Note that to construct the driving field used in this figure, we first carry out calculations using the procedure outlined above, which we use as the starting point for a numerical optimization of diagonal matrices and producing the desired behavior.
Figure 2.Reversing Anderson localization: light propagation. Wave propagation in nearest-neighbor coupled wave guides described by Eq. (7), with four choices of driving fields. (A) An undriven, disordered lattice with random nearest-neighbor couplings. The beam width remains limited, as expected for Anderson localization. (B) The same lattice, driven by a uniform amplitude AC electric field with an amplitude designed to induce DL for ; that is, for an which depends linearly on the site index, such that we would expect DL if not for disorder. (C) The same lattice, driven by an appropriately tailored time-periodic spatially nonuniform field. The nature of the driving field was determined to make the lattice behave as an effectively disorder-free lattice with uniform couplings, using numerical optimization. The beam exhibits discrete diffraction, as expected. We note the wave expansion seen here is indeed extremely similar to the one exhibited in a uniform lattice (not shown here, as it is practically identical), up to the effect of higher order corrections after much longer propagation times. (D) The same lattice, driven with a random driving field. The wave packet exhibits diffusive behavior, which is inconsistent with the behavior of both Anderson localization and a regular wave guide array.
Figure 3.Reversing Anderson localization: couplings. (Left panel) Black dots represent the couplings in the original undriven system in Eq. (6), with random . Red dots represent the couplings in the effective Hamiltonian in Eq. (8), which are produced when we drive the system as Eq. (2) with appropriate parameters . (Right panel) To calculate the appropriate driving parameters, we impose and use numerical optimization to calculate , shown here as a black line. Figure 2 verifies that these choices of driving parameters have the expected effect on light propagation through the wave guide array. The significant linear component (scale on right vertical axis) is responsible for uniform changes in the coupling coefficient; this produces a time-dependent electric field, similar to that of DL. To better exhibit the tailored spatial dependence required to undo Anderson localization, we indicate the smaller nonlinear component of the driving field in red (scale on left vertical axis).
In Fig. 2(D), we show that in contrast, applying an arbitrary driving force typically results in diffusive behaviors. In some cases, time-dependent disorder can even lead to anomalous faster-than-ballistic diffusive transport [84]. For our curved wave guides, we also find diffusive behavior if the driving parameters are arbitrarily chosen. This is in sharp contrast with the elimination of disorder that appears when the spatial dependence of the drive is tailored according to our prescription. The elimination of disorder we can obtain by appropriately driving the system is therefore in sharp contrast with typical regime of periodically driven disorder.
We obtain these results for relatively low where higher-order correction terms cannot be outright neglected. [For a sense of scale, recall that the random couplings are taken to be .] Since the magnitude of is proportional to , the dynamics of the driven system are comparable in speed to the dynamics of the undriven system, which is a clear advantage for experiments. Nevertheless, the influence of effects is seen to be practically small, especially if further numerical optimization of the driving parameters is performed.
C. Inducing Dynamic Localization
Another capability of our approach is the generalization of DL, as shown in Fig. 4. DL is typically only considered for spatially regular (periodic) lattices; it is commonly believed to fail in inhomogeneous lattices, with the notable exception of driven Glauber–Fock lattices [85]. The situation changes remarkably if we use a spatially inhomogeneous driving: it is clear from our explorations of Eqs. (2) and (7) that an appropriately tailored driving field could induce DL even in a lattice that is completely irregular. This gives us the powerful ability to sever specific links and effectively cut out parts of a lattice by driving it with an appropriate spatially inhomogeneous field. For example, we could create an artificial sharp edge in a topological system, such as in Refs. [25,27] and expect to see edge modes there. This technique extends to complicated, highly nonuniform, and even multidimensional lattices, which all obey a operator form similar to Eq. (2).
Figure 4.Inducing DL. (Left panel) This undriven irregular wave guide array has a coupling that changes as a cosine of the index number, which leads to a complex diffraction of a single site excitation. (Right panel) Using a tailored spatially nonuniform driving, we obtain notable suppression of the wave function spreading. The driving profile is produced in the same method as before; the target Hamiltonian is completely decoupled.
Floquet engineering has of course seen extensive applications beyond the curved wave guides we have examined here. For example, we could study different physical platforms, alternative methods of implementing a driving field, or even tinker with additional degrees of freedom such as frequencies. Spatially nonuniform Floquet engineering techniques can straightforwardly be applied to these systems as well. When constructing a spatially nonuniform Floquet driving field in any given case, one must strike a delicate balance between challenges in the mathematical calculation and physical implementation.
A. Magnus Expansion
When using perturbative methods to design a driving field, the nature of the Magnus expansion places restrictions on the Hamiltonians and driving fields. For example, to solve Eq. (2) at , we generally must solve an inverse commutator problem of the form . If and are both Hermitian, then must be skew-Hermitian. Likewise, if and are Hermitian, then is skew-Hermitian. Skew-Hermitian wave guide schemes or driving fields may be difficult to fabricate. This does not, however, render Magnus expansion methods impracticable. Indeed, our curved wave guide setup satisfied the skew-Hermitian criterion, and other potential implementations exist.
Alternatively, one could circumvent the problem of skew-Hermiticity by choosing a driving field such that the term vanishes and the leading term in the Magnus expansion is an integral over the double-commutator . In this case, , , and can be Hermitian simultaneously. However, even if and are tridiagonal, may have nonzero terms on its second off-diagonal (or vice versa). This has its own set of challenges for experimental realization.
B. Beyond the Magnus Expansion
The leading-order Magnus expansion provides a straightforward demonstration of the power of space-time-dependent Floquet engineering. However, a naive Magnus expansion is not optimal for solving high-precision Floquet engineering problems at low computational cost, and more creative approaches are necessary to fully capitalize on the power of space-time modulations, within physical constraints. For example, one could consider alternative approximation schemes (see, e.g., Ref. [86]) or simply use numerical optimization to determine a spatially nonuniform driving field that produces as close to the desired behaviors as possible. The potential for harnessing the full power of space-time Floquet engineering for physical applications is bright.
5. OUTLOOK
We open up Floquet engineering to the full breadth of space-time-dependent driving fields, giving us greater control over wave systems. By exploiting spatial degrees of freedom, we showed that we could both induce DL in nonuniform lattices and undo Anderson localization by giving photonic wave guides appropriate curvature. The technique is more broadly applicable, and we foresee its use in a range of atomic, optical, and condensed matter systems. In the future, perhaps this technique can help in fabricating classes of Hamiltonians that currently are difficult or implausible to realize, such as imaginary gauge fields, Hamiltonians with only next-nearest-neighbor couplings, or non-Abelian Hamiltonians.
Acknowledgment
Acknowledgment. We thank Mordechai Segev and Yaakov Lumer for initial work on this project many years past [87], and S. T. S. is grateful to Moti for hosting her as a summer research student during that time. We thank Momchil Minkov and Pengning Chao for interesting discussions.
APPENDIX A: INVERSE COMMUTATOR PROBLEMS
Consider an inverse commutator problem of the form in Eq. (4):
The physical constraint of Hermiticity of and restricts the form of ,
From and real, we need to be skew-Hermitian, i.e., . Skew-Hermiticity and reality of imply that its diagonal vanishes, for all . To solve for components with , we first label the eigenvalues and eigenvectors of as . We arrange the eigenvectors into a matrix . Multiplying Eq. (A1) on both sides by and and examining the , we have
Thus, for , we have
We also note that this is only consistent with being really skew-Hermitian if and only if which is in general not true. However, in practice, this usually is not a major concern, given that we are working only to the lowest order in a perturbative expansion.
Now that we know the entries of from Eq. (A5), it is straightforward to solve for by simply multiplying on the left by and on the right by ,
We emphasize again that spatially nonuniform Floquet engineering schemes can be considered for more general classes of operators as well.
APPENDIX B: TIGHT-BINDING MODEL DERIVATION
In this section, we review the tight-binding model equivalent of a wave guide lattice. Next, we generalize it to the case of wave guides that have oscillating widths and different trajectories. To the best of our knowledge, the latter derivation has not explicitly been written down elsewhere in the literature; it may thus be of interest to the reader.
It is useful to first analyze the case of a single wave guide, which we take as centered about the curve with the shape function . Under the slowly varying envelope (paraxial) approximation, light propagating through this wave guide is described by the paraxial wave equation
This equation is isomorphic to the Schrödinger equation, albeit with the propagation direction of waves in optics playing the traditional role of time in quantum mechanics. The wavenumber is , where is the refractive index of the bulk material and is the wavelength of the light. The shape function can be related to the total refractive index as .
We let the waveguide shape evolve slowly and remain localized around , so that it is a simple single-mode wave guide. We denote the local phase accumulation speed of the propagating mode as , where is a -dependent loss term arising from coupling to continuum modes. If changes adiabatically (i.e., slowly relative to ), then this rate of loss is small with . This statement describes many physical systems. For example, an array of low-contrast wave guides created by laser-writing techniques has strongly paraxial wave guides, and contributes to a uniform decay of light in all wave guides within the array. We remark here that even small decay can have a major practical effect in certain cases, like long arrays.
Next, let us consider a set of single-mode wave guides labeled centered about the curves . Here, is the longitudinal direction along which waves propagate, and and are functions describing how the wave guides curve through space in the plane, i.e., transverse to the propagation direction . The width of each of these wave guides varies in space, and we describe the radius of a wave guide in the – plane at each point along its trajectory in the direction by the shape function . We now can write the behavior of the full array as
In the case discussed in this paper, we choose the wave guides to be equally spaced in the direction (i.e., ) with the same periodically curved trajectory , i.e.,
We distribute the wave guides at random spacings relative to one another along the direction. We write the local mode profile of the wave as and the complex phase accumulation rate at the th wave guide as . Note that for all , we have
Let us write a wave packet as the sum where are a set of coefficients. Plugging Eq. (B5) into Eq. (B1), we have
We can rearrange terms to find
Next, we make the transform , giving us
Then, we plug Eq. (B4) into Eq. (B8), giving us
Next, we multiply both sides by . Integrating over , we get where we have defined
Here, we make the crucial assumption that the modes are tightly bound matrices and the matrix is purely real and mostly diagonal: . The terms are more nuanced and may lead to complicated behavior.
Typically, we can make significant simplifications to Eq. (B10) if is a narrow potential well that changes on a short distance scale relative to ; using Eq. (A3), we write
Using the nearest-neighbor approximation, we have
We thus obtain a standard tight-binding model, where we have written that and .
APPENDIX C: CONSTRUCTING CURVED WAVE GUIDES
We now examine how to physically construct a Hamiltonian like Eq. (7) using curved wave guides. Because we are creating a periodic potential, we need wave guides with a shape that is periodic along the direction. We let the phase accumulation rate change as . There are several ways to fabricate such a system. First, we could modulate the depth of the wave guide. This would also change the magnitude of , but this change is often small relative to and thus would have a negligible effect on system dynamics. A second option is to change the shape of the potential asymmetrically so that the area of the wave guide (and thus the value of ) would change significantly, whereas the coupling coefficient in a particular direction would not. It is most practicable to carry out a full calculation, accounting for and correcting for the effects of a -dependent coupling.
To induce a rotating phase, we oscillate the wave guide trajectories in unison, as described in Eq. (A3). One possible trajectory we could take is , where is the separation between wave guides in the direction, similar to that of Ref. [10]. However, this trajectory rapidly diverges, which is a hindrance to experiment. So, instead we choose the convergent, scalloped trajectory,
Here indicates the floor operation. The scalloping is -periodic and has kinks at every ; however, mild experimental smoothening should not be detrimental to the working principles behind this Floquet engineering scheme.
Because Eq. (C1) is locally parabolic, it gives rise to linear accumulation of phase
If we set , we obtain the desired phase rotation of the coupling coefficient. Recall, however, that the wave guides are not uniformly distributed in the direction, which results in an overall nonuniform coupling coefficient, with the modal decay distance. If we take , then .
As a consequence, we have an experimentally realizable setup that is similar but not identical to Eq. (7),
Here, just as in the main text, we assume that the sign of changes every half-cycle . This again would create a discontinuity in an experiment.
 AI Video Guide
AI Video Guide  AI Picture Guide
AI Picture Guide AI One Sentence
AI One Sentence