
Xuesong Gao, Yuhao Li, Liqiang Zhang, Zhihua Chen. Precise Positioning Technology for Automatic Guided Vehicles Based on SURF Algorithm[J]. Laser & Optoelectronics Progress, 2019, 56(10): 101203
- Laser & Optoelectronics Progress
- Vol. 56, Issue 10, 101203 (2019)
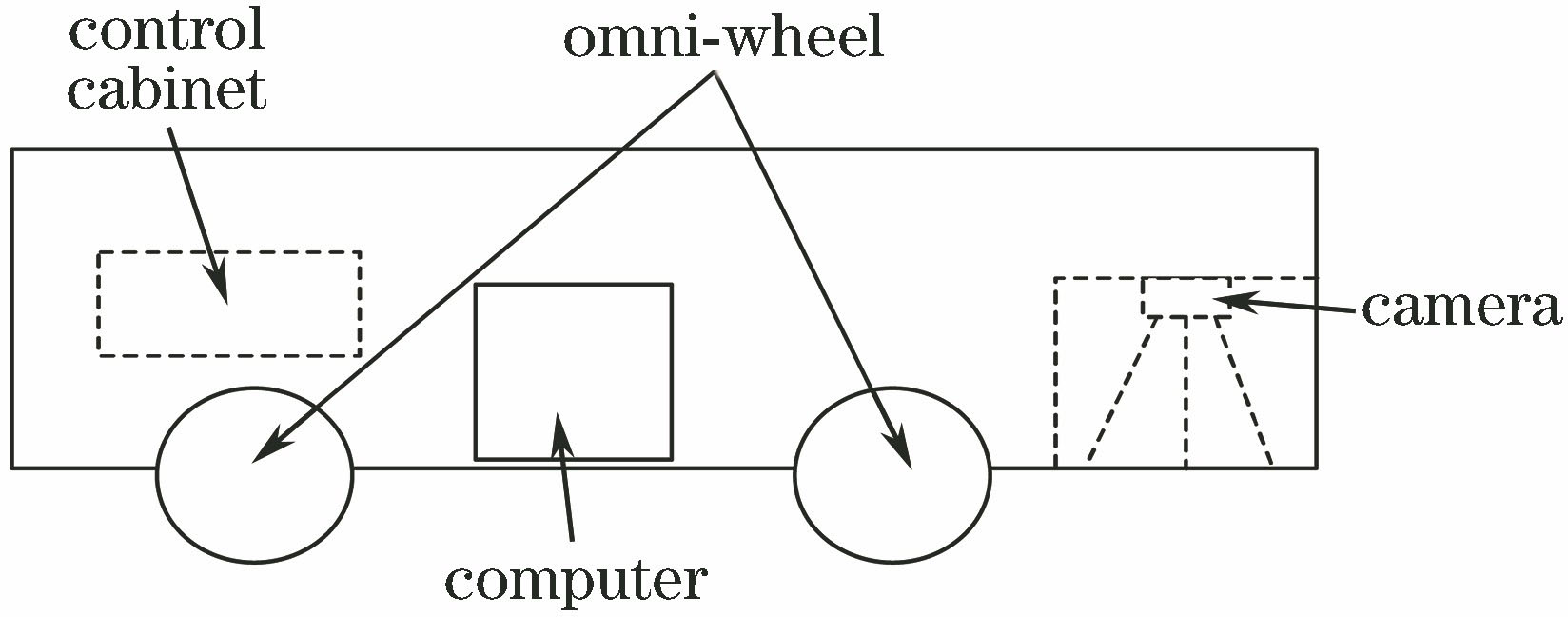
Fig. 1. Structural model of AGV
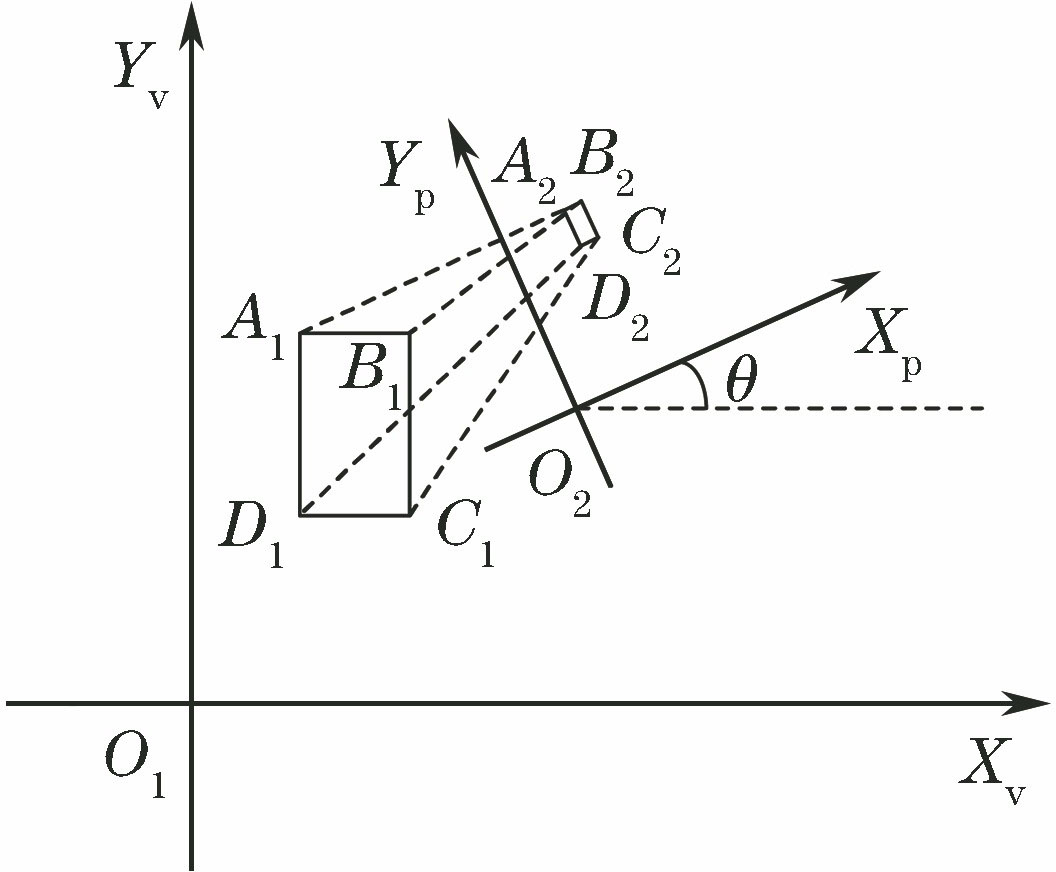
Fig. 2. Visual calibration
Fig. 3. Coordinate model of AGV
Fig. 4. Model of motion-compensation. (a) Schematic of image rotation; (b) coordinate relation for image rotation
Fig. 5. QR code
Fig. 6. Image after Gaussian filtering
Fig. 7. Extraction of feature points of image
Fig. 8. Image matching results for different algorithms. (a)(b) ORB algorithm; (c)(d) SIFT algorithm; (e)(f) SURF algorithm
Fig. 9. AGV and camera. (a) AGV; (b) camera
Fig. 10. Experimental data. (a) Positioning results in X axis; (b) positioning results in Y axis; (c) angular positioning results


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20