
Wenjing Xu, Jinhong Xian, Dongsong Sun. Polarization lidar system for smoke and dust monitoring and experimental research[J]. Infrared and Laser Engineering, 2023, 52(3): 20220508
- Infrared and Laser Engineering
- Vol. 52, Issue 3, 20220508 (2023)

Fig. 1. Structural schematic of polarization lidar
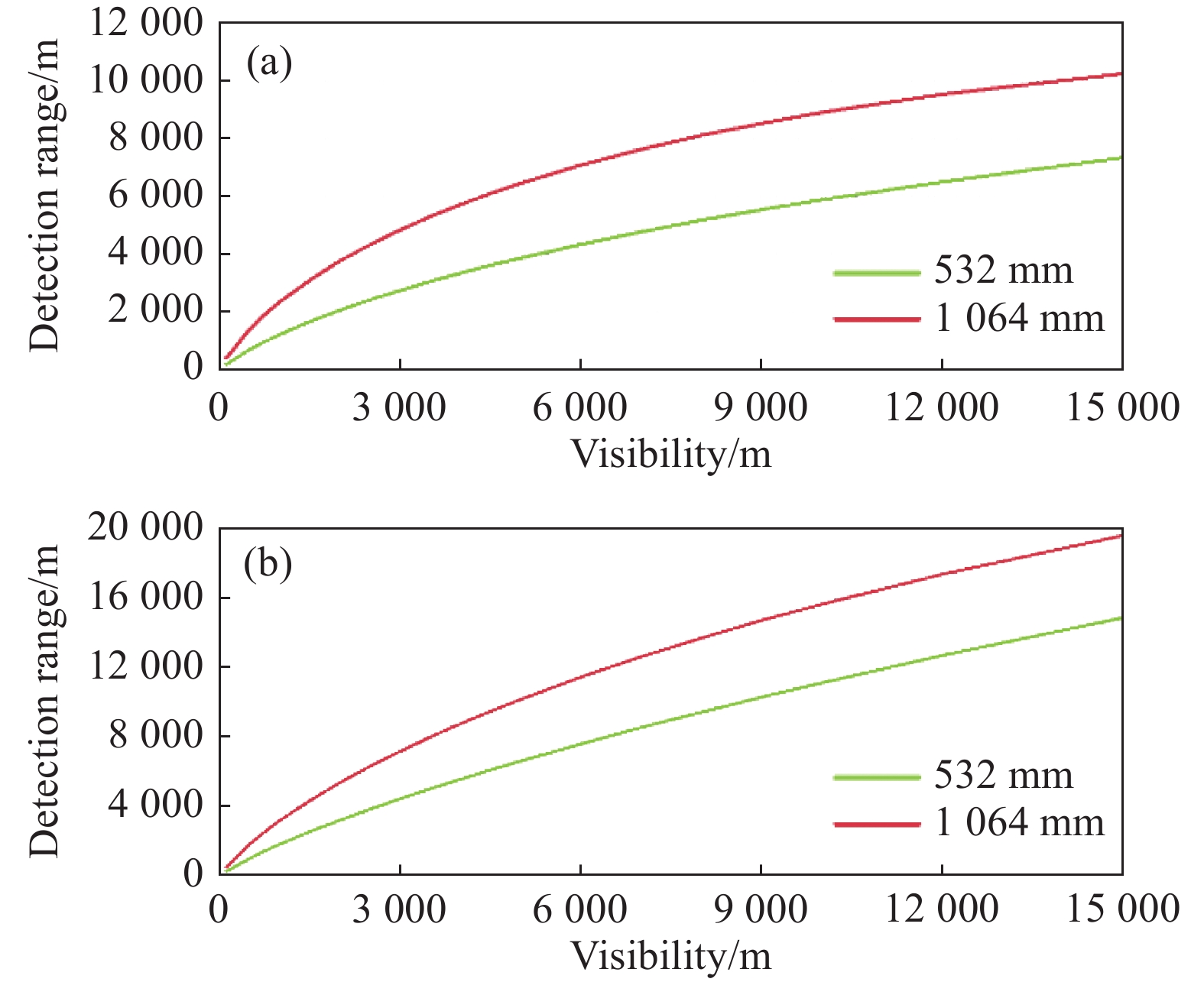
Fig. 2. Simulation of 532 nm and 1064 nm polarization lidar detection range under different visibility conditions. (a) Daytime; (b) Night-time
Fig. 3. Diagram of lidar scanning in different environments. (a) Moun-tain, many obstacles; (b) Grassland, wetlands, fewer obstacles
Fig. 4. Flowchart of scanning and data processing strategy
Fig. 5. Variation of height deviation and range deviation with detection range at different elevation angles
Fig. 6. Gaussian plume simulation results. (a)-(e) Atmospheric stability B , average wind speed of 1 m/s, concentration distribution map at 0 m, 50 m, 100 m, 150 m, and 200 m; (f)-(j) Atmospheric stability C , average wind speed of 5 m/s, smoke concentration distribution diagram at 0 m, 50 m, 100 m, 150 m, and 200 m
Fig. 7. Lidar installation position and site photos
Fig. 8. Lidar scanning pseudo-color images
Fig. 9. Lidar installation position and site photos
Fig. 10. Pseudo-color map of range calibration signal obtained from background spectrum scanning measurement
Fig. 11. Fire point recognition. (a) Pseudo-color images of depolarization ratio obtained by scanning measurements; (b) Profile of depolarization ratio obtained by single radial measurement
|
Table 1. Main technical parameters of the polarization lidar
| |||||||||||||||||||||||||||||||||
Table 2. Simulation parameters of lidar detection performance
|
Table 3. Table of national standard diffusion para-meters


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20