
Zeyu Guo, Zhen Chen, Bo Liu, Enhai Liu, Huachuang Wang. Research on Single-Photon Sparse Point Cloud Spatio-Temporal Correlation Filtering Algorithm[J]. Laser & Optoelectronics Progress, 2025, 62(8): 0828004
- Laser & Optoelectronics Progress
- Vol. 62, Issue 8, 0828004 (2025)
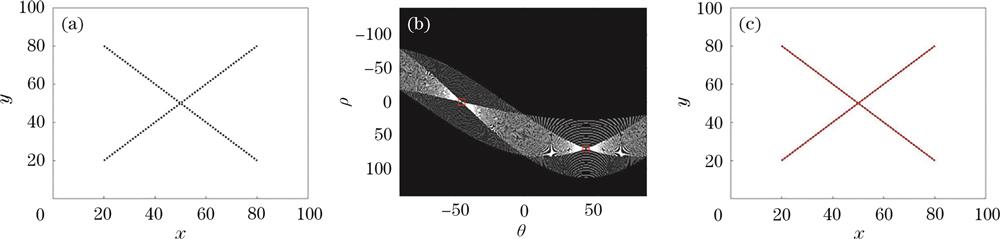
Fig. 1. Principle of Hough transform. (a) Simulated echo signal points to be detected; (b) echo signal points are converted to sine curves in polar coordinate by the Hough transform; (c) detection of a straight line connecting the echo signal points
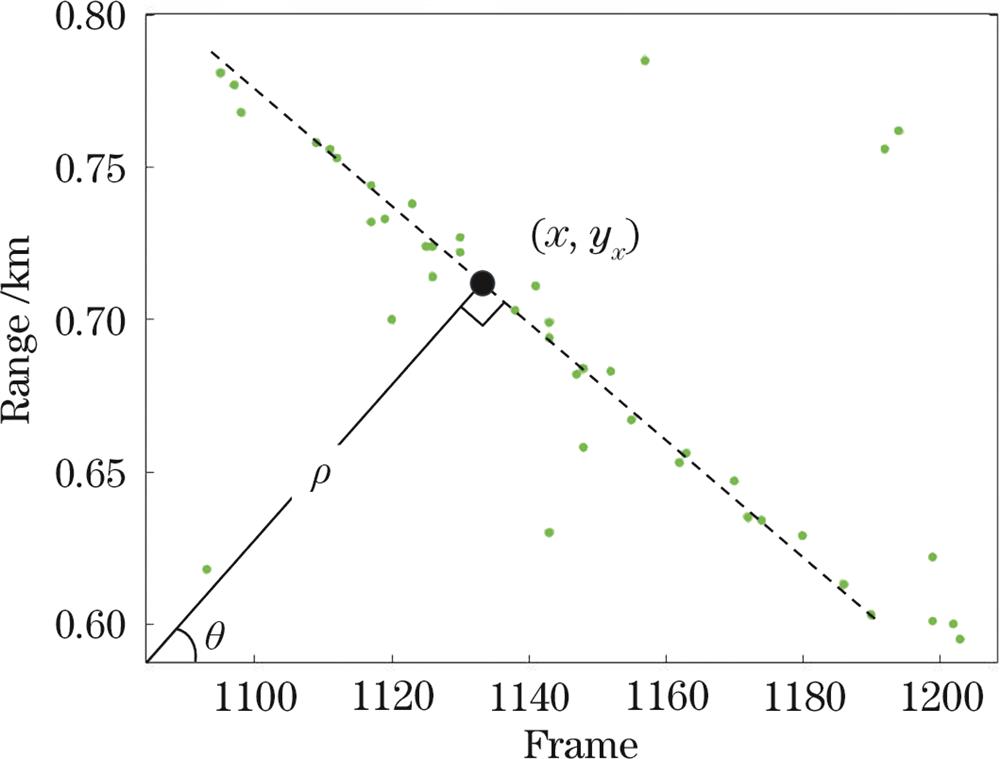
Fig. 2. Schematic diagram of the definition for the parameters of Hough transform
Fig. 3. Flowchart of proposed algorithm
Fig. 4. Sine curves of different resolutions. (a) Resolution of 0.1; (b) resolution of 0.5; (c) resolution of 1.5; (d) resolution of 5.0
Fig. 5. Simulated point cloud under extreme motion condition. (a) Point cloud; (b) localization image of point cloud
Fig. 6. Processed results of simulated data by proposed algorithm. (a) Overall result; (b) result of large error area (region ①); (c) result of low signal-to-noise ratio area (region ②)
Fig. 7. Schematic diagram of experimental facilities
Fig. 8. Schematic diagram of experimental process
Fig. 9. Processed results of measured echo point cloud. (a) Overall map of measured echo point cloud; (b) point cloud of local high signal-to-noise ratio area (region ①); (c) point cloud of local sparse area (region ②)
Fig. 10. Comparison between traditional Hough transform and the proposed algorithm. (a) Traditional Hough transform; (b) proposed algorithm
Fig. 11. Processed results of measured data by proposed algorithm. (a) Measured echo point cloud; (b) part of the point cloud that needs to be processed; (c) extracted effective echo point cloud; (d) overall data processed result; (e) processed result of high signal-to-noise ratio area (region ①); (f) processed result of partial echo missing area (region ②)
Fig. 12. Processed results of measured data by proposed algorithm. (a) Measured echo point cloud; (b) part of the point cloud that needs to be processed; (c) extracted effective echo point cloud; (d) overall data processed result; (e) predicted trajectory corrected result after the effective echo is extracted (region ①); (f) Kalman filter prediction result when the echo is missing (region ②)
|
Table 1. Main parameters of single-photon LiDAR tracking and ranging system


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20