 AI Video Guide
AI Video Guide  AI Picture Guide
AI Picture Guide AI One Sentence
AI One Sentence

Chenxiao Lin, Yifan Wang, Yidong Tan, "High precision and sensitivity anti-interference 3D coherent ranging based on dual reversely chirped self-mixing lasers," Adv. Photon. Nexus 3, 066003 (2024)
- Advanced Photonics Nexus
- Vol. 3, Issue 6, 066003 (2024)
Note: This section is automatically generated by AI . The website and platform operators shall not be liable for any commercial or legal consequences arising from your use of AI generated content on this website. Please be aware of this.
Abstract
Keywords
1 Introduction
Recently, the flourishing development of manufacturing industry, precise metrology, and aerospace has increased the demand for the high-performance ranging and three-dimensional (3D) imaging systems. Due to the noncontact and long-distance measurement ability, light detection and ranging (lidar) stands out among existing methods and has been extensively applied in various areas, such as autonomous driving,1 environmental monitoring,2,3 remote sensing,4 and 3D mapping.5 Compared with conventional mature ranging methods, such as time-of-flight (TOF) lidar and structured light sensors, the frequency-modulated continuous-wave light detection and ranging (FMCW lidar) has inherent immunity to the ambient light and thus a higher ranging stability. Furthermore, FMCW lidar can easily achieve high ranging resolution without high-bandwidth electronic devices and is capable of obtaining the distance and velocity information simultaneously in a single measurement.6
One of the biggest drawbacks of FMCW lidar is the limited echo detection sensitivity, which restricts its applications in weak light detection and low-reflectivity object metrology. In practical applications, the light power reflected from the targets, which depends on multiple factors, such as surface reflectance and incident angle, is normally weak and uncontrollable. Especially for noncooperative targets, which refer to the scattering objects that have lower surface reflectivity than cooperative targets, such as reflective mirrors, the insufficient echo power cannot provide a desirable signal-to-noise ratio (SNR), resulting in a shorter detection range and lower precision. The most direct way to improve the SNR of the echo signal is to increase probe power, including selecting high-power light sources and employing additional optical amplifiers. Despite the maturity of these devices, the complexity, cost, and power consumption of the system have increased. Multiple optical and electrical methods have also been previously demonstrated to strengthen the SNR of measuring signals, such as phase-locked loop,9,10 special avalanche photodetector,11 distributed feedback (DFB) laser array,12
Another major challenge faced by FMCW lidar is the anti-interference ability in a fluctuating environment. In many practical ranging scenarios, environmental disturbance, including air turbulence, temperature fluctuations, and other environmental vibrations, is one of the most important and unavoidable factors that affect the precision of 3D coherent ranging. The measuring stability and accuracy are of great significance, while they are difficult to be ensured in a disturbed environment without appropriate compensation. So far, many methods have been proposed for the compensation of vibration in FMCW lidar.20
Sign up for Advanced Photonics Nexus TOC. Get the latest issue of Advanced Photonics Nexus delivered right to you!Sign up now
Here, we demonstrate an ultrahigh precision and sensitivity anti-interference all-fiber FMCW lidar based on a pair of reversely chirped self-mixing lasers. Through establishing a unique self-mixing stimulated radiation process, the proposed system achieves ultrahigh echo detection sensitivity without adding additional expensive devices. With a single-laser output power of less than 0.1 mW, the system reaches an ultralow detection limit of subpicowatts and a high ranging linearity of
2 Results
2.1 Reversely Chirped Self-Mixing FMCW Lidar System
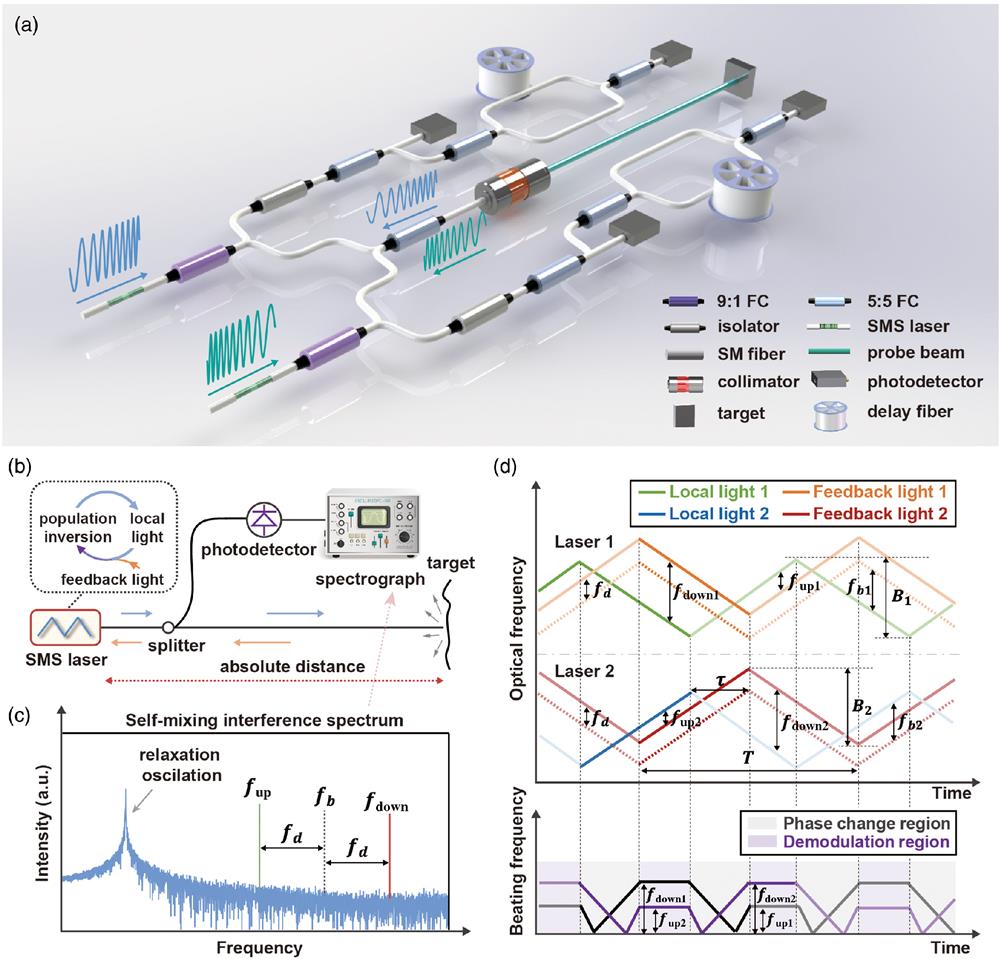
As shown in Fig. 1(a), the proposed reversely chirped self-mixing FMCW lidar system employs a dual self-mixing swept (SMS) laser structure for signal amplification and vibration compensation, two separated auxiliary unbalanced Mach–Zehnder interferometers (MZIs) for swept nonlinearity suppression, and a common-path detection part for signal transmission and reception. The SMS lasers simultaneously emit continuous lights in the C-band with opposite sweeping directions, which are then divided into two parts using a 9:1 fiber coupler (FC). Both beams are recombined into a single-mode (SM) fiber with a 5:5 FC and illustrated onto the target through a collimator. The small portion passes through an optical isolator and is further divided into two parts: with one part being received by a photodetector for distance demodulation and the other part entering an MZI for swept nonlinearity monitoring. A resampling-based method29,30 using the clock interference signal generated from the auxiliary MZI is employed to eliminate the laser tuning fluctuations that may result in spectrum broadening and precision deterioration. Compared with the various existing swept nonlinearity methods, such as optical phase-locked loop,9,31 injection locking,18,25 phase-noise-compensated technique,32,33 and the optical comb,34,35 this method has the merits of high robustness, low cost, and simple data processing, thus possessing a good practicality in real-time changing environments. The detailed experimental process and formula derivation are described in Secs. 4 and 5, respectively.
![]()
Figure 1.System configuration and working principle of the reversely chirped self-mixing FMCW lidar system. (a) Architecture of the proposed reversely chirped self-mixing FMCW lidar. FC, fiber coupler; SM, single mode; SMS, self-mixing swept. (b) Basic system configuration of self-mixing FMCW lidar. (c) Spectrum of self-mixing FMCW signal under vibrating environment. (d) Schematic diagram of working principle of real-time vibration compensation.
In contrast to conventional FMCW lidar with an MZI structure, additional FCs and circulators (CIRs) are no longer needed to create a reference signal in the detection part of the self-mixing FMCW lidar, as shown in Fig. 1(b). Instead, the local intracavity light functions as a reference. Through reinjecting the reflected light into the laser cavity, a beating signal carrying time-delay information of the probe beam is produced. Meanwhile, the weak feedback light participates in the simulated radiation of the laser, and the original population inversion is broken and rebuilt.36
Through separating the output light with a splitter, one branch of the interference signal is recorded by a photodetector, and its spectrum can be further analyzed on a spectrograph as shown in Fig. 1(c), in which the Doppler frequency shift
2.2 SMS Laser Design and Evaluation
The schematic structure of an SMS laser used in the proposed system is shown in Fig. 2(a). A compact erbium-doped DFB fiber laser fixed on a piezoelectric ceramic actuator (PZT) is employed as the light source and is backward pumped by a single-frequency semiconductor laser, which is centered at 980 nm and driven by a temperature-controlled laser driver, using a wavelength division multiplexer (WDM). The forward output of the laser enters the subsequent fiber system through the WDM, while the backward light is used for monitoring. An optical isolator is installed in the monitoring part to prevent the unwanted reflected light from affecting the self-mixing process. Frequency modulation is completed by periodically stretching the laser cavity using a PZT. A photo of the experimental setup is shown in Fig. 2(b). Owing to the large mode-hopping-free swept range and the modulation method, the stability of the self-mixing interference is guaranteed. The reversely chirped output of the SMS laser is achieved by applying reverse triangular voltage to PZT, as shown in Fig. 2(c), and a 105 GHz mode-hopping-free tuning is achieved when the amplitude of the driving voltage is set to 90 V. To minimize the impact of the unideal transmission in the phase-change region, 95% of each ramp is selected as the region of interest (ROI) for signal demodulation. With the C-band output wavelength and the submilliwatt output level, safety and low power consumption are both ensured.
![]()
Figure 2.Design and testing of SMS lasers. (a) Schematic diagram of the SMS laser. (b) Photograph of the experimental setup of the SMS laser. ISO, isolator; WDM, wavelength division multiplexer; PZT, piezoelectric ceramic actuator. (c) Driving voltages and the corresponding frequency deviation. ROI, region of interest. (d) Power spectrum of the SMS laser obtained through delay self-heterodyne interferometry method. (e) Spectrum, FWHM, and (f) repeated resolution testing results of the long-distance ranging.
The measuring range is of great importance for an FMCW lidar system, which, theoretically, is determined by the coherence length of the light source. Compared to most commercial semiconductor DFB lasers and vertical-cavity surface-emitting lasers (VCSELs), fiber lasers normally possess a narrower linewidth and therefore a longer coherent length while maintaining a good swept range. A delay self-heterodyne interferometry method46,47 with a 6 MHz acousto-optic modulator and a 30 km long delay fiber is employed to evaluate the linewidth of the laser to estimate the coherent length; the result is shown in Fig. 2(d). Since the
2.3 Localization Accuracy and Linearity
To demonstrate the high localization accuracy achieved by our reversely chirped self-mixing FMCW lidar, repeated step positioning experiments are conducted targeting an unpolished steel target mounted on a high-precision displacement stage with 50 nm localization accuracy. Here, the localization accuracy refers to how close the measurement result is to the ground truth. The displacement stage, as well as the target, moved
![]()
Figure 3.Results of system localization accuracy and linearity. (a) Localization accuracy results under different methods with
2.4 Long-Time Ranging Stability
To characterize the ranging stability of the system under a relatively stable environment, long-time repeated same-spot measurement is conducted targeting the same steel plate as the linearity testing. The measurement deviations from the average employing different demodulation methods are depicted in Fig. 4(a). During a long-term test of over 3 h, the system has an SD of
![]()
Figure 4.Results of long-time ranging stability. (a) Ranging results of over 3 h. Inset: SD of ranging results. (b) Data distribution and corresponding Lorentz fittings of long-time ranging results using different methods.
2.5 Detection Limit
As illustrated in Eq. (1), compared to the classical optical beating, an extra amplification
![]()
Figure 5.Detection limit of the system. (a) The SNR versus feedback attenuation targeting a corner cube mirror. Inset: the spectrum of the self-mixing signals at maximum optical attenuation that can be provided in the experiment. (b) Diagram of the experimental setup for detection path with arrows indicating the transmitting direction of the light. CIR, circulator; COL, collimator; CM, corner cube mirror. (c) Spectrum of the laser relaxation oscillation.
2.6 Anti-Interference Single-Point Ranging
To demonstrate the anti-interference ranging stability of the system, repeated same single-point measurements targeting a diffusely scattering unpolished steel plate under vibrating environments are conducted. The experimental ranging results under different kinds of environmental disturbances, which are created through a fan and an air heater, are displayed in Figs. 6(a) and 6(b), respectively. The corresponding SD is also calculated to characterize the ranging stability more intuitively, as shown in Fig. 6(c). It can be clearly seen that the measurement results using the proposed method under both kinds of disturbances have the smallest fluctuation range among all methods. Especially in the jitter environment created by the air heater, where the temperature and air fluctuations coexist, the SD is improved by more than 1 order of magnitude using the proposed method compared with others, demonstrating the anti-interference ranging ability of the system.
![]()
Figure 6.Single-point anti-interference measurement results. Repeated single-point measurement results using different methods with (a) wind interference and (b) wind and heat interference. (c) SD results of various demodulation methods under different interferences.
2.7 Anti-Interference 3D Ranging
To demonstrate the anti-interference and high-sensitivity imaging capability of the system, multiple noncooperative objects with fine structures and relatively weak surface reflections are selected as targets; the initial optical distance
![]()
Figure 7.Anti-interference 3D imaging results. (a) Schematic of experimental configuration. (b) Data acquisition flowchart. AWG, arbitrary waveform generator; PA, power amplifier; PS, phase shifter; GS, galvo scanners; PC, personal computer; DAQ, data acquisition card; PD, photodetector. The imaging results of (c) an ancient copper coin and (d) three aluminum blocks with different thicknesses. The letters after “-” (from “i” to “v”) correspond to the object photos, static imaging results using the proposed method, imaging results using the traditional single-region method, the adjacent-averaging method, and proposed method. (e) Precisely manufactured aluminum step that has five front surfaces with a difference in thickness of
Moreover, a comparison of the key indicators between our scheme and other previously reported FMCW ranging systems is performed, as presented in Table 1. It can be clearly observed that, owing to the high-ranging sensitivity brought by the self-mixing process, the proposed system achieves the highest ranging precision, exhibits the best linearity, and operates with the lowest probe power compared to other methods, showcasing its superior performance. For the current system, the limitation in ranging resolution stems from the limited sweep bandwidth of the SMS lasers. This could potentially be improved in the future by employing a more powerful PZT to extend the fiber laser, thereby increasing the stretching length.
| Method | Probe power | Precision | Resolution | Linearity | Target |
| Ref. | 15 mW | 0.99 mm | — | Desk | |
| Ref. | 10 mW | 5 cm | 2.5 cm | — | Foam board |
| Ref. | 20 mW | — | — | — | Mannequin |
| Ref. | 0.16 mW | 1 mm | 5.23 mm | Hallway | |
| Ref. | — | 2 cm | 2.5 cm | Metal blocks | |
| This work | 1.8 mm | Scattering objects |
Table 1. Comparison of the existing FMCW lidar systems.
3 Discussion
In summary, a high-precision anti-interference FMCW lidar system based on dual reversely chirped self-mixing lasers with narrow linewidths is demonstrated. Owing to the spontaneous amplification brought by the self-mixing process, the system achieves an ultralow echo detection limit of subpicowatt level, enabling the high-precision ranging of noncooperative targets with low reflectivity at a low output power level of
Compared with the conventional TOF lidar and amplitude-modulated continuous-wave (AMCW) lidar, which offer the best localization accuracy of centimeter or millimeter-scale,51 the proposed FMCW lidar system can achieve better localization accuracy by 2 orders of magnitude without using additional expensive devices, such as single-photon avalanche diodes. What is more, the TOF lidar and AMCW lidar are susceptible to ambient light such as sunlight and light from another lidar, which reduces the SNR and may result in false detection, while the proposed FMCW lidar has inherent immunity to the ambient light due to its coherent detection, offering a higher ranging stability and precision. In addition, compared with the proposed FMCW lidar, widely used structured light-based 3D imaging methods struggle with ranging inclined objects and balancing detection range and depth resolution.
In contrast with the conventional FMCW lidar that typically employs an MZI structure, the proposed self-mixing FMCW lidar does not require an additional reference arm in the detection path to produce the beat signal, which eliminates the need for extra fiber devices, such as FCs and CIRs, saving the related costs. Furthermore, in classical FMCW lidar systems, high sensitivity is only achievable when the echo signal power is sufficient, which often requires a light source with high output power or additional optical amplifiers. High-performance lasers and erbium-doped fiber amplifiers (EDFA) increase the cost and complexity, while cheaper semiconductor optical amplifiers (SOAs) commonly suffer from spectral distortion and high nonlinearities. Instead, a spontaneous gain can be obtained through the self-mixing process in our FMCW lidar system, significantly enhancing the sensitivity of the system and enabling high ranging precision and imaging quality with low power consumption when targeting the noncooperative objects with ultralow echo power. Consequently, the proposed scheme eliminates the need for high-power tunable lasers or additional optical amplifiers, and it also reduces the requirements for high-performance photodetectors due to the increased ranging sensitivity from the self-mixing process, greatly reducing overall system costs.
Although various vibration compensation methods have been proposed in recent years, including additional frequency-shift interferometers,15 signal mixing,20 segmented interference,21 and Kalman filters,52,53 they either require complex structures or suffer from poor real-time compensation effects. What is more important, most existing methods are only discussed in single-point ranging and simulation, and their effectiveness has not been proven in more practical 3D imaging scenarios. The anti-interference capabilities of both single-point ranging and 3D imaging with different demodulation methods are thoroughly discussed in this paper. In a fast-jittering environment where the ranging SD using conventional demodulation methods exceeding
Despite the above advantages, there are still many aspects that can be improved in our system in the future. First, the distance resolution of the system, which refers to the ability to distinguish between two simultaneously presented targets, only reaches a millimeter level due to the limited swept bandwidth. In our system, the available effective bandwidth depends on the maximum variation of the laser cavity length, which is determined by the driving force capability of PZT. By selecting a more powerful PZT or other devices with an adjustable cavity, such as a Fabry–Perot filter, the swept bandwidth can be effectively increased. Moreover, the actual self-mixing gain is associated with the frequency of the beating signal, and the maximum gain is achieved when the beating frequency equals the relaxation oscillation frequency, leading to an imbalance in system sensitivity. The SNR and sensitivity of the system can be further improved through appropriate control of the self-mixing gain, such as by adding frequency-shifted devices.44,45 It is noted that the fiber dispersion is neglected in our system due to the relatively small swept bandwidth, which also affects the SNR and can be further improved through the chirp decomposition method.54 In addition, due to the self-mixing based amplification process, the theoretical maximum measuring rate of the system is capped below the relaxation oscillation frequency, which restricts the upper limit of the measuring speed of the system to some extent. Furthermore, there is still a relatively short noncommon-path part in our system, resulting from the coupling process of two lasers. The compensation effect of the Doppler frequency shift can be further enhanced by reducing the length of the noncommon path, implementing more temperature control and fixation, and employing lasers with closer wavelengths.
In general, with the advantages of high sensitivity, excellent localization accuracy, high ranging stability, and anti-interference ability, the system provides a good solution for 3D coherent imaging, promising potential applications in high-precision assembly, space exploration, and manufacturing detection.
4 Method
4.1 Swept Nonlinearity Suppression Based on Resampling
As shown in Fig. 1(a), in addition to the common-path detection part, two unbalanced MZIs are used for the swept nonlinearity suppression in the auxiliary paths. Because the light is transmitted in optical fiber and carries only a single piece of delay information, the interference signal generated in the auxiliary path normally presents a good sinusoidal shape. The specific resampling process can be described as follows: (1) simultaneously obtain the measuring signal and auxiliary signal with a data acquisition card, and apply digital high-pass filtering on the auxiliary signal to eliminate its baseline. (2) Divide the auxiliary signal into several equal-phase intervals with zero crossing points. (3) Identify the points with the largest absolute value in each interval from step 2 to determine the peak and valley feature points, and record their corresponding positions to form a clock sequence. (4) Resample the measuring signal in the time domain using the clock sequence obtained in step 3. This converts the original equal-time sampling into equal-frequency sampling, effectively eliminating the swept nonlinearity. Note that isolators installed at the front of the auxiliary path are necessary to prevent the optical feedback unwanted beams from participating in the self-mixing process, which may affect the recognition of a beating signal.
4.2 Comparison between Different Demodulation Methods
In this paper, many ranging and 3D imaging comparative experimental results between conventional single-laser methods and the proposed method are presented. The single-region demodulation method with a single laser, which uses the beat signal of a fixed up/down swept region for Fourier transform, is normally used in most research due to its simplicity. However, the drift of the peak position of the spectrum caused by the Doppler shift, brought by unavoidable environmental disturbance, cannot be handled well using this method. It is observed that the Doppler frequency shift has opposite effects on the beat frequency of the adjacent demodulation region, as shown in Fig. 1(d), assuming the environmental jitter remains unchanged during a complete swept period. In this case, the vibration can be eliminated by averaging the beat frequencies of the adjacent demodulation region. However, in more scenarios where the environmental jitter changes rapidly in real time, these two methods are difficult to compensate for the Doppler frequency drift. By employing two lasers with reversely chirped output optical frequency, the Doppler frequency in a single demodulation region can be obtained by the simple difference between the beat frequencies of the two lasers in the same time period, as illustrated in Fig. 1(d) and Eq. (2). In this way, the real-time compensation can be achieved.
4.3 Data Acquisition in 3D Ranging Experiment
The schematic diagram of data acquisition in 3D ranging experiments is shown in Fig. 7(b). Synchronous driving and acquisition process can be achieved by using an arbitrary waveform generator, which is controlled by a computer, to synchronously output the driving signal of PZTs and the trigger signals of the galvo scanners and the data acquisition card. The original driving signal is then amplified and divided into two parts by a power amplifier, and the reversely chirped control can be realized by applying a 180 deg phase shift to one of them. Finally, the auxiliary clock signals and self-mixing signals received by photodetectors are collected by the data acquisition card and sent to a computer for further processing.
5 Appendix
5.1 Swept Nonlinearity Suppression of the Dual Self-Mixing Light Sources
In practical applications, the swept nonlinearity always exists due to various factors, such as fluctuation of modulation circuit, instability of mechanical tensile stress, and temperature vibration, which results in spectral broadening and a peak shift of the beat signal and thus decreases the system precision, as shown in Fig. 8(a). In the proposed reversely chirped self-mixing FMCW lidar system, a resampling-based method, which is widely used in optical coherence tomography (OCT) monitoring the clock signal generated from another independent MZI, is employed to suppress the swept nonlinearity of the light source. The detailed equation is as follows: to provide a more concrete explanation of the nonlinear elimination process of the self-mixing laser, the nonlinear term of the optical frequency is developed into a high-order Tylor series of time
![]()
Figure 8.(a) Schematic of ideal linear swept modulation and actual situation with nonlinearity. (b) Spectrum results of the beat signal targeting a static object and a vibrating object before and after resampling.
It can be observed from Eq. (6) that additional nonlinear terms exist in the beat frequency of the self-mixing signal, which severely affects the extraction of the actual beat frequency
It can be observed from the above equation that the nonlinear terms no longer exist in the frequency of the resampled self-mixing signal, which means that the target distance can be accurately demodulated from the beat frequency as
5.2 Working Principle of Vibration Compensation
Suppose that the frequency of the output light emitted from the swept laser is modulated linearly; there will be a beat frequency peak related to the delay information and a low-frequency relaxation oscillation peak in the spectrum of the self-mixing signal, as shown in Fig. 1(c). When the target is in a quasi-static state, the beat frequency of the up and down swept region will be equal, which can be addressed as
This deviation is ignored by the researchers in low-precision imaging scenarios. In some FMCW-based 3D ranging systems, the deviation caused by the Doppler frequency is often suppressed by averaging the beat frequency of the adjacent demodulation region. However, this method is only suitable for environments with little vibration, where the Doppler frequency of the adjacent region is regarded as a constant. In more scenarios, such as outdoor assembly and remote sensing, the effectiveness of the conventional adjacent-averaging method is limited. To achieve a strictly real-time compensation, a configuration with dual reverse-chirped lasers is employed. The frequency of the up-swept and down-swept region of the two reversely chirped lasers can be written as
By substituting Eq. (13) into Eq. (14), the final demodulation distance can be rewritten as
In this way, the Doppler frequency shift can be eliminated effectively. To further simplify the demodulation process, the tuning rate of the two lasers is often kept the same, which can be achieved by setting the driving voltage with the same amplitude and chirp period.
5.3 Detection Limit Calculation
The SNR refers to the ratio of the strength of the received useful signal to the strength of the noise. When SNR is equal to unity (or 0 dB), the useful signal and noise are at the same intensity, making it difficult to accurately locate the peak position of the spectrum. Therefore, the detection limit, which refers to the minimum echo power that can be effectively detected by the system, is estimated when the SNR is equal to unity and can be calculated as
5.4 Imaging Results of Other Objects
The original intention of choosing geometric objects for 3D imaging, as presented in the previous section, was to more intuitively demonstrate the anti-interference imaging advantages of our system and to better display the data distribution. In addition to these tests, we also conduct 3D imaging experiments on other objects with different materials and shapes, including an artificial tree, a foam snowflake, and a ceramic horse, with the results displayed in Fig. 9. It can be observed that the imaging results rebuild the actual scene with good fidelity, again demonstrating the imaging capability of the system.
![]()
Figure 9.The 3D imaging results of (a) an artificial tree, (b) a foam snowflake, and (c) a ceramic horse; with corresponding photographs shown in (d) for the artificial tree, (e) for the foam snowflake, and (f) for the ceramic horse.
Chenxiao Lin received his BS degree in optoelectronic information science and engineering from Tianjin University, Tianjin, China, in 2021. He is currently working toward the PhD with the Department of Precision Instrument, Tsinghua University, Beijing, China. His current research interests include FMCW ranging, iterative algorithm, machine learning, and optical imaging.
Yifan Wang received his BS degree in optical engineering from Tianjin University, Tianjin, China, in 2018 and received his PhD in the Department of Precision Instrument, Tsinghua University, Beijing, China, in 2023. His current research interests include optical imaging and FMCW LiDAR.
Yidong Tan is a professor and doctoral supervisor in the Department of Precision Instruments at Tsinghua University. He is a recipient of the Excellent Youth Science Fund of the National Science Foundation of China, Newton advanced fellowship of the Royal Society of UK, the head of the innovation team awarded by the Ministry of Education, the vice president of the Optoelectronic Industry Committee of the China Electronic Information Industry Federation, and the managing director of the Mechanical Testing Instrument Branch of the China Instrument and Control Society. He mainly engages in laser technology and precision measurement applications. He has undertaken more than 40 projects in the field of precision instruments under the National Natural Science Foundation of China, the Ministry of Science and Technology’s Key Research and Development Program, the Military Science and Technology Commission’s foundation strengthening, and major scientific instrument special projects. He has published over 100 papers in journals such as Nature Communications, PhotoniX, Research, Optica, Bioelectronics and Biosensors, and IEEE Transactions on Industrial Electronics, and authorized 37 patents. He has presented more than 60 keynote/binary/invited reports at international conferences and has successively won the Gold Award at the Geneva International Invention Exhibition, the Recommendation Award from the Editor-in-Chief of the Chinese Journal of Lasers, the First Prize for the Technological Invention of the Chinese Society for Optical Engineering, and multiple first and second Prizes for technological invention of the Chinese Institutes of Electronics.


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20