AI Video Guide
AI Video Guide  AI Picture Guide
AI Picture Guide AI One Sentence
AI One Sentence
In 1996, McFeeters proposed the normalized difference water index (NDWI), leveraging the unique reflectance characteristics of water bodies in remote sensing images, high reflectance in the green band and low reflectance in the near-infrared band. This index enables effective extraction of water bodies from remote sensing images and has become a classic and widely cited method in water body extraction, with thousands of references in academic research. While NDWI is widely applied to remote sensing images, its application to airborne LiDAR point cloud data remains limited. Compared to remote sensing image data, airborne LiDAR offers advantages such as high-precision laser point cloud data acquisition, independence from solar radiation, and greater operational flexibility. To address this gap, we propose a novel NDWI-LiDAR method that facilitates the rapid and accurate extraction of water body information by using only the elevation data from dual-frequency laser point clouds, overcoming the dependence on full waveform data.
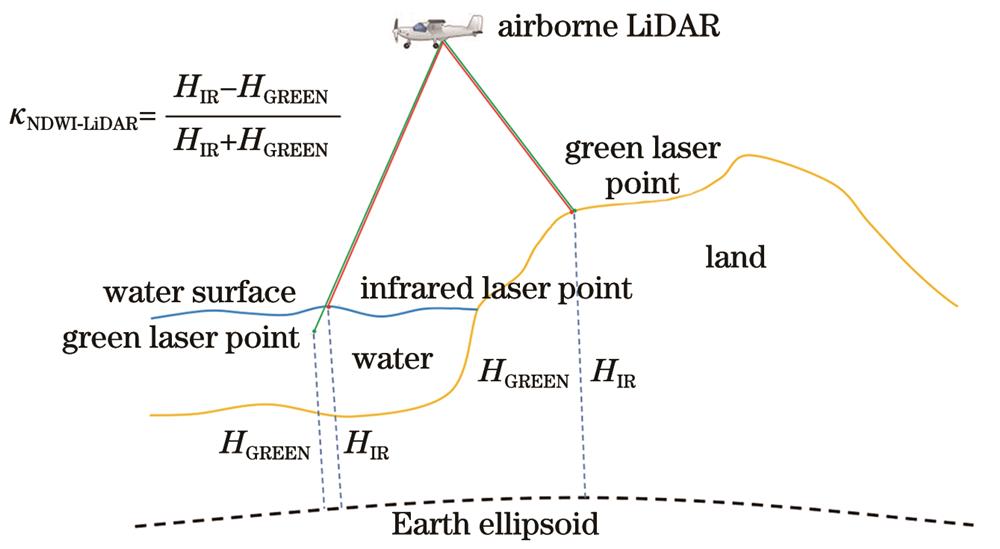
In this paper, the proposed NDWI-LiDAR leverages the uncertainty and measurement bias of green lasers in water surface measurements and is based on the point clouds generated by airborne infrared and green lasers. The expression form of this index is similar to that of the NDWI, but the pixel values of the near-infrared and green bands in remote sensing images are replaced by the elevations of infrared and green laser points. First, the raw measurement data from the infrared and green lasers are used to calculate the positions of the laser footprints, resulting in infrared and green laser point clouds, respectively. Second, the expression for NDWI-LiDAR is provided based on the different characteristics of infrared and green lasers in water and land measurements. Third, a land?water discriminator utilizing the NDWI-LiDAR is introduced, with the Otsu method applied to establish the threshold for water extraction. Finally, the pulse numbers of adjacent laser points are analyzed to differentiate and eliminate noisy water points, thus obtaining the final water surface laser points and realizing accurate water body extraction from airborne laser point clouds (Fig. 5).
The measurement datasets collected by the Optech CZMIL system are used to validate the correctness and effectiveness of the proposed method. In the experimental area, the NDWI-LiDAR values for land tend toward 0 and negative, whereas those for water are positive. As shown in the NDWI-LiDAR probability density distribution image (Fig. 10), the land and water NDWI-LiDAR data exhibit distinct dual peaks: the peak NDWI-LiDAR density value for water is approximately 0.3, whereas that for land is approximately 0. Compared with the traditional random sample consensus (RANSAC) method, which is based on single-frequency laser point clouds, the NDWI-LiDAR method proposed in this paper reduces the number of incorrectly extracted water points by 86.7% (Fig. 12). Equations (12) and (13) are used to calculate the distance bias and structural similarity (SSIM) index of the land?water interface determined by the two methods. The maximum bias, mean bias, and standard deviation of the land?water interface determined by the NDWI-LiDAR are 25.2, 4.2, and 4.2 m, respectively, with an SSIM value of 0.92. In contrast, the maximum bias, mean bias, and standard deviation determined via the RANSAC method are 50.3, 8.8, and 6.7 m, respectively, with an SSIM value of 0.89 (Table 1).
In the experimental area, the NDWI-LiDAR values for land tended toward 0 and negative values, whereas those for water are positive. From the perspective of the NDWI-LiDAR probability density distribution, the values for land and water significantly differ. The peak NDWI-LiDAR density for water is approximately 0.3, whereas that for land is approximately 0. The results indicate that the NDWI-LiDAR values for land and water are significantly different, suggesting that it is reasonable to use NDWI-LiDAR as a LiDAR-based index for water extraction. Compared with the traditional RANSAC method, which relies on single-frequency laser point clouds, the NDWI-LiDAR method proposed in this paper reduces the number of incorrectly extracted water points by 86.7%, reduces the standard deviation of the land?water interface by 37.3%, and improves the SSIM index by 3.3%. The results demonstrate that the NDWI-LiDAR method effectively leverages the advantages of dual-frequency laser point clouds, thus enabling accurate and efficient acquisition of spatial distribution information for water bodies based on LiDAR point clouds.