
Xinglei Zhao, Meili Zhu, Kewen Hu, Fengnian Zhou. Water Extraction Based on Normalized Difference Water Index for Airborne LiDAR[J]. Acta Optica Sinica, 2025, 45(12): 1228003
- Acta Optica Sinica
- Vol. 45, Issue 12, 1228003 (2025)
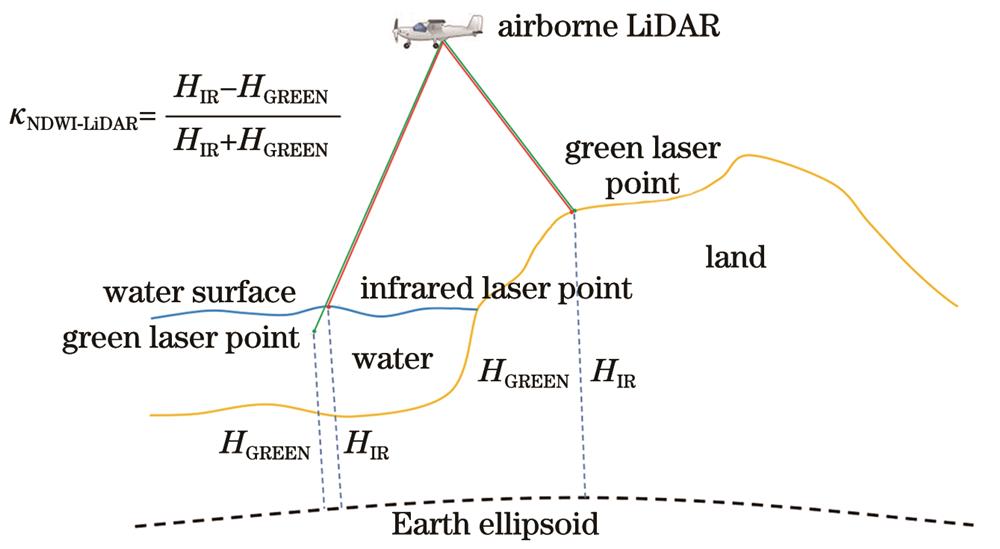
Fig. 1. Illustration of dual-frequency laser water/land measurement
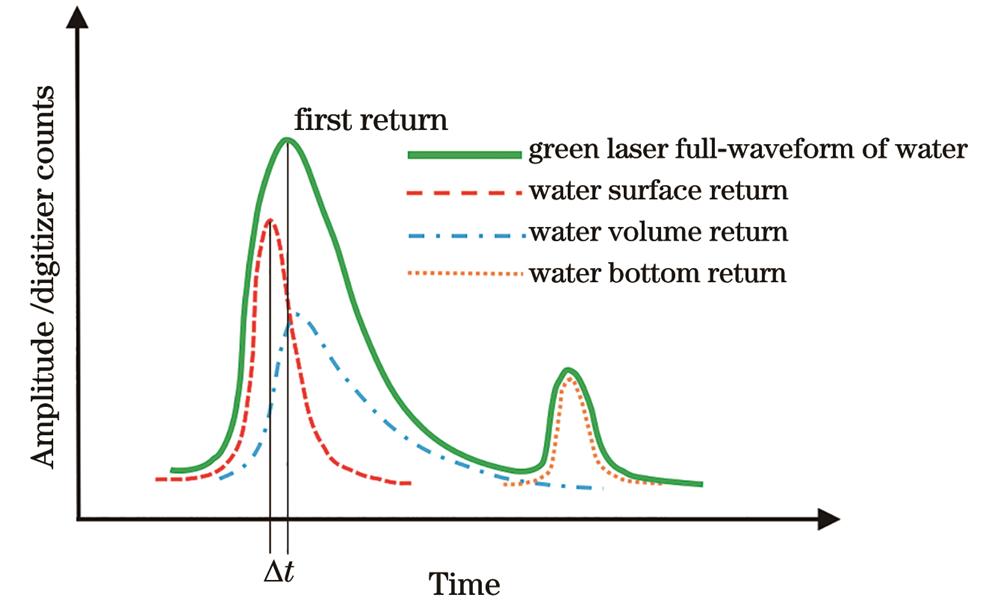
Fig. 2. Illustration of components in a green laser full-waveform of water
Fig. 3. Relationships of various reference coordinate systems
Fig. 4. Identification and removal of noisy surface points considering the adjacent laser point pulse number
Fig. 5. Flowchart of the water extraction based on dual-frequency LiDAR point cloud and NDWI-LiDAR
Fig. 6. Location of the airborne LiDAR experiment
Fig. 7. Point clouds of infrared and green lasers. (a) IR laser point cloud; (b) green laser point cloud
Fig. 8. Local probability density distribution of infrared and green laser point elevations
Fig. 9. Spatial distribution of NDWI-LiDAR values in the experimental area
Fig. 10. Probability density distribution of NDWI-LiDAR in the experimental area
Fig. 11. Water/land identification results based on NDWI-LiDAR. (a) Raw water points; (b) corrected water points; (c) raw land points; (d) corrected land points
Fig. 12. Comparison of water extraction results by two LiDAR point clouds. (a) RANSAC; (b) NDWI-LiDAR
| ||||||||||||||||||||||||||
Table 1. Comparisons of two LiDAR point cloud-based water extraction methods


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20